
/prod01/fit-cdn-pxl/media/header-images/showcase-header.jpg)
Awards 2022
Presidents Cup Awards
CROPP (Cubesat Research of Plants Platform)
Team Lead: Zachary Ewing
Team Member(s): Andrew Chrustic, David Daughenbaugh, Miranda Easton, Michael Hoadley, Jose Lopez, Devlan McDaniels, Jason Morgan, Briana Student, Briella Sweeney
Faculty Advisor(s): Dr. Douglas Willard
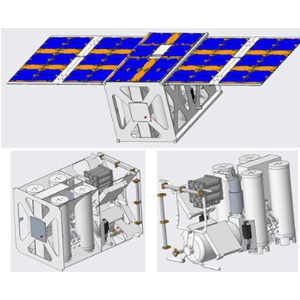
The main objective of CROPP is to create a CubeSat capable of autonomously growing plants for research deemed too dangerous in a closed environment, i.e., infecting crops with pathogens. To successfully fulfill the mission statement, it was determined CROPP shall be a 12U-XL configuration that can grow radish microgreens in four individual chambers for 28 days. Data will be downlinked daily to document plant health and environmental conditions. The satellite would be inserted into a Dawn-to-Dusk, sun-synchronous, low-Earth orbit, to ensure power generation requirements are met.
The major challenge that this project presents is how to design a theoretical CubeSat without many resources pertaining to microgravity and space environments. This particularly became an obstacle when designing the autonomous water feed system. Enough water had to be delivered to the plant habitats for mission survival, but not too much such that the chamber becomes flooded and obstructs the camera or other components. To design for this, several growth trials were performed to determine the minimum volume of water each habitat would need. This ultimately influenced the design of the payload including bladder size, motor speed, and tube length. Another challenge encountered was the lack of direct professional industry mentorship. Aside from Dr. Willard, CROPP lacked a specific faculty advisor, which made some elements of this project difficult to design. With that said, everything CROPP has been able to accomplish comes from the hard work, independent research, and committed dedication of every member of this team.
In addition to the fabricated components, many of the designs are modeled using true and appropriate materials and components. Therefore, CREO Parametric was used extensively in accurately assembling the full CubeSat, as seen in the figures below. For our theoretical elements, ANSYS simulations (thermal and static) were used to gauge our operating temperatures and launch loading conditions. For orbital analysis, STK and MATLAB Simulink helped in visualizing our orbit along with any accountable disturbances.
At the conclusion of this project, CROPP has successfully been able to address all subsystems of the CubeSat and its mission, providing sufficient traceable elements of space and mission-worthy components. Although several of the requirements extend beyond the scope of Senior Design, much of the work, designs, and concepts developed here could help lay the foundation for autonomous plant experimentation for future colonization missions.
Post-Combustion Carbon Capture for Marine Shipping Applications
Team Lead: Alice Pennings
Faculty Advisor(s): Dr. K. Lindeman
Northrop Grumman Best in Show Awards
CROPP (Cubesat Research of Plants Platform)
Team Lead: Zachary Ewing
Team Member(s): Andrew Chrustic, David Daughenbaugh, Miranda Easton, Michael Hoadley, Jose Lopez, Devlan McDaniels, Jason Morgan, Briana Student, Briella Sweeney
Faculty Advisor(s): Dr. Douglas Willard
The main objective of CROPP is to create a CubeSat capable of autonomously growing plants for research deemed too dangerous in a closed environment, i.e., infecting crops with pathogens. To successfully fulfill the mission statement, it was determined CROPP shall be a 12U-XL configuration that can grow radish microgreens in four individual chambers for 28 days. Data will be downlinked daily to document plant health and environmental conditions. The satellite would be inserted into a Dawn-to-Dusk, sun-synchronous, low-Earth orbit, to ensure power generation requirements are met.
The major challenge that this project presents is how to design a theoretical CubeSat without many resources pertaining to microgravity and space environments. This particularly became an obstacle when designing the autonomous water feed system. Enough water had to be delivered to the plant habitats for mission survival, but not too much such that the chamber becomes flooded and obstructs the camera or other components. To design for this, several growth trials were performed to determine the minimum volume of water each habitat would need. This ultimately influenced the design of the payload including bladder size, motor speed, and tube length. Another challenge encountered was the lack of direct professional industry mentorship. Aside from Dr. Willard, CROPP lacked a specific faculty advisor, which made some elements of this project difficult to design. With that said, everything CROPP has been able to accomplish comes from the hard work, independent research, and committed dedication of every member of this team.
In addition to the fabricated components, many of the designs are modeled using true and appropriate materials and components. Therefore, CREO Parametric was used extensively in accurately assembling the full CubeSat, as seen in the figures below. For our theoretical elements, ANSYS simulations (thermal and static) were used to gauge our operating temperatures and launch loading conditions. For orbital analysis, STK and MATLAB Simulink helped in visualizing our orbit along with any accountable disturbances.
At the conclusion of this project, CROPP has successfully been able to address all subsystems of the CubeSat and its mission, providing sufficient traceable elements of space and mission-worthy components. Although several of the requirements extend beyond the scope of Senior Design, much of the work, designs, and concepts developed here could help lay the foundation for autonomous plant experimentation for future colonization missions.
Bioleaching of JEZ-1 Simulant by Anabaena cylindrica: Possible Fuel for Future Space Exploration

Team Lead: Lea Adepoju
Faculty Advisor(s): Dr. Andrew G. Palmer
Best in Show Awards
CROPP (Cubesat Research of Plants Platform)
Team Lead: Zachary Ewing
Team Member(s): Andrew Chrustic, David Daughenbaugh, Miranda Easton, Michael Hoadley, Jose Lopez, Devlan McDaniels, Jason Morgan, Briana Student, Briella Sweeney
Faculty Advisor(s): Dr. Douglas Willard
The main objective of CROPP is to create a CubeSat capable of autonomously growing plants for research deemed too dangerous in a closed environment, i.e., infecting crops with pathogens. To successfully fulfill the mission statement, it was determined CROPP shall be a 12U-XL configuration that can grow radish microgreens in four individual chambers for 28 days. Data will be downlinked daily to document plant health and environmental conditions. The satellite would be inserted into a Dawn-to-Dusk, sun-synchronous, low-Earth orbit, to ensure power generation requirements are met.
The major challenge that this project presents is how to design a theoretical CubeSat without many resources pertaining to microgravity and space environments. This particularly became an obstacle when designing the autonomous water feed system. Enough water had to be delivered to the plant habitats for mission survival, but not too much such that the chamber becomes flooded and obstructs the camera or other components. To design for this, several growth trials were performed to determine the minimum volume of water each habitat would need. This ultimately influenced the design of the payload including bladder size, motor speed, and tube length. Another challenge encountered was the lack of direct professional industry mentorship. Aside from Dr. Willard, CROPP lacked a specific faculty advisor, which made some elements of this project difficult to design. With that said, everything CROPP has been able to accomplish comes from the hard work, independent research, and committed dedication of every member of this team.
In addition to the fabricated components, many of the designs are modeled using true and appropriate materials and components. Therefore, CREO Parametric was used extensively in accurately assembling the full CubeSat, as seen in the figures below. For our theoretical elements, ANSYS simulations (thermal and static) were used to gauge our operating temperatures and launch loading conditions. For orbital analysis, STK and MATLAB Simulink helped in visualizing our orbit along with any accountable disturbances.
At the conclusion of this project, CROPP has successfully been able to address all subsystems of the CubeSat and its mission, providing sufficient traceable elements of space and mission-worthy components. Although several of the requirements extend beyond the scope of Senior Design, much of the work, designs, and concepts developed here could help lay the foundation for autonomous plant experimentation for future colonization missions.
Identification of Quorum Sensing Bacteria from plant isolates aboard the International Space Station

Team Lead: Conner Cadenhead
Team Members: Allura Haddad, Alyssa Carson
Faculty Advisor(s): Dr. Andrew G. Palmer
SOL EV Charging Station

Team Lead: Nicholas West
Team Members: Cole Stubbe, Vinai Balroop, Amna Al Kathiri, Dylan Hall
Faculty Advisor(s): Dr. Troy Nguyen
The project mission is to design a Silver LEED certified Electric Vehicle (EV) Charging Stop that will enhance the US transportation sector. The structure will be analyzed for project planning, structural design, geotechnically, transportation analysis and water resources. This station entails a waiting area, a convenience store and sustainable quick charging. The project features a two-story convenience store, 39 electric vehicle charging stations, a solar farm and a retention pond. The first floor of the convenience store incorporates many fuel station features such as drink coolers, merchandise aisles, mechanical rooms and battery storage. The second floor is geared towards relaxation with an entertainment lounge and an eatery. The EV chargers will be covered by a prefabricated metal canopy system. A major challenge of this project has been that there is limited information on EV charging facilities of this caliber. This project is the first of its kind in the state of Florida, and hence it requires out-of-the-box thinking to develop estimates for consumption, usage, and traffic counts.
First, two team members did a traffic investigation on a smaller scale EV charging station in Palm Bay, Florida. This charging area consisted of eight chargers, and the team took traffic counts for the morning and evening peak hours. This data was compiled with other factors on rising EV usage to determine the size of the facility. Second, the structural aspects of the building were kept similar throughout the entire project to account for material shortages. The convenience store was designed using the same size rebar and the same compressive strength concrete. Third, the retention pond was proposed to accommodate our current project and the second phase of commercial development on the rest of the parcel of land. Lastly, the solar panel concrete platform needed a very specific design.
Our goal for this project was to develop a design concept that we believe has the potential to be a nationwide success as we grow into a more sustainable future.
Project Thor
Faculty Advisor(s): Dr. Siddhartha Bhattacharyya
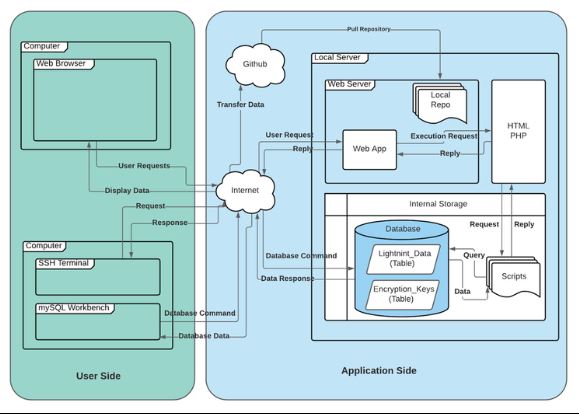
Project Description: Currently, computers gather their entropy from real world sources of randomness such as IDE timing, mouse movements, or the timing between keystrokes on a keyboard. However, with increasing computer processing power, hacker’s ability to predict the output of these sources has become far more probable. Additionally, it is possible that these sources of entropy may become compromised by attackers. This is where Project Thor comes in. Simply put, Project Thor provides an additional truly random source of entropy that can be mixed with other sources to build more diverse and secure entropy pools for operating systems. This way, if one source of entropy were to become compromised, an operating systems entropy pool would still be secure.
Design: Project Thor accomplishes its goal by taking in data gathered from the Global Lightning Detection Network (GLD360) and skimming off the categories with the highest entropy inherent to them. It then creates random numbers by simply selecting random chunks of data from each of the aforementioned categories, padding them with zeros so that they have the same number of bits, and then adding all of the data together to form the final random number. This number goes through a final check to ensure it is not a duplicate of one previously produced before being output to our web application so ensure proof of concept.
Challenges & Future Work: The future of Project Thor mainly lies in continuously improving our algorithm to more efficiently select data from each category without producing duplicates. Additionally, the next logical step for our project would be to implement a rolling database so that we can continually increase entropy over time by eliminating the predictable data trends that only occur locally within small samples.
Halbach Array Charger
Team Lead: David Sebesta
Team Members: Sean Catron, William Gay, Abdallah Al Kindi, Abigail Tunnell, Ariel Santiago, Bin Huang, David Perry, Lucas Harbour, Omar Al Sinani
Faculty Advisor(s): Dr. Ed Caraway
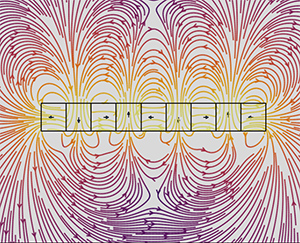
Electric vehicles are an important step in lowering carbon emissions and using renewable energy. The process to charge electric vehicles is becoming outdated and needs to be improved. Wireless charging with directed near field antennas is the future of charging electric vehicles. The Halbach Array was invented by Klaus Halbach which finds that by placing magnets rotated with 90° turns, the magnetic field generated above the array is strong while the magnetic field below the array is close to zero. Using other concepts like Maxwell’s equations and antenna theory, our team is trying to show that by using electromagnetic solenoids, a prototype for a Halbach Antenna Array can be created.
Theoretically, our team needed to first simulate the Halbach Antenna Array. Using MagPyLib, nine cubes were placed to act as electric solenoids that produce magnetic fields in a Halbach Array orientation. The simulation generated field lines that are strengthened above the array and weakened below the array. This result indicated that this concept needed to be explored experimentally.
The first step was to design a bobbin with SolidWorks Modeling that can be wrapped with copper wire to create a solenoid to generate a magnetic field. A compact bobbin was 3D printed and copper wire was wrapped around 150 turns to generate an inductance of 1.3mH. 9 of these bobbins were hot glued together with 90° turns to create a transmitting Halbach Antenna Array. The antenna needed to operate at a resonant frequency. Based on the parallel connection of the 9 solenoids with inductance of 1.3mH, applying a 1µF capacitor in series with the circuit, and the resonant frequency formula , the resonant frequency was 13.2kHz. The circuit had a sinusoidal input with a voltage of less than 10V and LT1167CN8 amplifiers with a gain of 100 were used.
Two methods were used to measure the Halbach Antenna Array. The first method was to use a small probe coil. The small loop coil needed to be matched with the resonant frequency to accurately measure the generated field lines. By measuring the inductance of the coil, and using the resonant frequency formula, a 4µF capacitor was attached to the coil so it operated at 13.2kHz. The results showed that the field strength changes horizontally above and below the array that resembles the theoretical model. The results also showed that the strength of the field lines were similar above and below the array possibly due to the limited strength of the Antenna Array. The second method of measuring the transmitting antenna was with a matching receiving antenna. The fields measured with the matching antenna were found to be stronger when the coils were perfectly aligned creating a flux linkage than when the antennas were misaligned. This indicates that a successful prototype was created.
In summary, our team was taking the first step in improving the charging of electric vehicles. By demonstrating that a Halbach Antenna Array creates directed field lines over the array and minimized field lines below the array, a Halbach Antenna Array is a possible solution to wirelessly charge electric vehicles. The next steps to create a wireless antenna charger could be more research into circular arrays or more tests to determine the best phase to couple the antennas and maximize the power transferred. This is all to create a cleaner, safer, and more efficient future in electric vehicles.
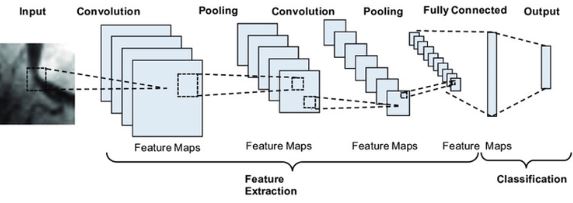
Classifying MRI Imaging of Alzheimer's disease with CNN's
Faculty Advisor(s): Dr. Munnever Subasi
Alzheimer’s disease (AD) is a progressive neurological disorder most prevalent in individuals 65 and older. AD is notorious for memory loss, cognitive decline, and impairment of judgment. Anatomically, parietal and cerebral cortex atrophy are indicative of the condition. While a variety of cognitive tests are used for diagnosis, MRI usage is becoming increasingly popular, as it can be a non-invasive and inexpensive way to detect the disease. AD currently has no cure, but early detection and intervention can help to slow its progression. Automating the diagnosis process could save both time and money.
In the project, Convolutional Neural Networks (CNN’s) are utilized for image classification purposes to classify the data set of 6400 brain MRI images into their respective classes: non-demented, very mild demented, mild demented, and moderate demented. A simple CNN was written and the hyperparameters were tuned for comparison against LeNet and AlexNet which are two well-known CNN architectures. The data was largely imbalanced, with over 2500 images belonging to the majority class, non-demented, and only 52 belonging to the minority class, moderate demented in the training data. This is the case with many medical imaging datasets due to real world circumstances and easier accessibility to healthy individuals. This posed difficulties throughout the project despite efforts to balance the classes, using methods such as synthetic minority oversampling technique (SMOTE).
Throughout the process of implementing CNN’s, overfitting was a large concern which is very common with medical data. The differences in the MRI scans are very subtle compared to other types of data sets. Batch normalization and Dropout were added to the model to combat this. The overall model accuracy was 0.92 for the simplest model, 0.88 for LeNet, and 0.79 for AlexNet. Despite efforts to balance the classes, since there was very limited data for mild demented and moderate demented brains, the model had more difficulty classifying these. However, it is most important to be able to tell a healthy and diseased brain apart for medical intervention, and the model did quite well at classifying non demented brains and very mild demented brains, which is arguably the most import distinction to make. Convolving the classes that are proximal may help to make the results more interpretable in the future.
U.S. Navy Cylindrical Payload Rotation and Translation Device
Team Lead: Gennaro Zappariello
Team Members: Javier Baez, Jeffery Gerage, Tyler Hawes, Nick La Rosa, Logan Montminy, Owen Shea, James Alexander
Faculty Advisor(s): Dr. Ilya Mingareev
Click to view the video on YouTube
Requirements and Problem Statement
The United States Navy approached the team looking for a mechanism capable of lifting and rotating a half-ton cylinder to/from a vertical orientation, as well as rotating to/from a horizontal orientation. The purpose of the device is to install the aforementioned cylinder on a predetermined fixture through the use of purely mechanical means that can be easily operated as well as transported within the warehouse space. Aside from the cylinder rotational operations, the major deliverables, as requested by the Navy are as follows:
● Full mobility of the entire device
● Device must preclude use of any and all electrical systems
● Maintain a soft budget of $7,500 with a hard cap of an additional $2,500.
● The device must lift the test cylinder while maintaining a YFOS of 1.5 and an UFOS of 2.0 in both vertical and horizontal orientations.
● The team must provide their own test cylinder with a diameter of 36”, height of 21”, weight of 1,020 lb (+/- 20%), and center of gravity 5” from the top
● The only contact made with the cylinder by the device is within a 5” interface zone located 5” from the top of the cylinder, exerting a maximum pressure of 35psi
Design Process and Features
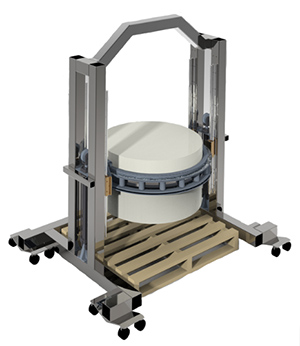
One of the first major challenges the project presented was properly integrating the several complex rotational mechanisms together while operating under such a significant load (1020 lb). This took 5 prototypes over the course of the design process to perfect, resulting in the final iteration displayed below. The final design showcases the following unique features:
Our custom MK V “gripper” mechanism, consisting of an inner collar clamped to the cylinder, wrapped in an outer collar with a series of rollers to allow full 360° rotation about the cylinder’s axis
● Industrial bearings attached to the gripper’s mounting points on the lifting towers to allow full rotation from the vertical to horizontal orientation of the cylinder
● A hydraulic system with dual hydraulic cylinders capable of lifting over 9 tons
● The option to lift the cylinder utilizing either a hand pump or pneumatic pump
● A solid main frame consisting of 4” square steel tubing to maximize strength
● Easy transportation of the entire device via 4 caster wheel assemblies shown in the full assembly image.
Evaluating the Water Treatment Potential of Caulerpa Prolifera Grown in Low Light Conditions

Team Lead: Anna Held
Team Members: Allura Haddad, Alyssa Carson
Faculty Advisor(s): Dr. Austin Fox
Caulerpa prolifera is a historically abundant macroalgae in the Indian River Lagoon (IRL) and provides many of the same habitat functions as seagrasses, including sediment stabilization, nutrient uptake, and shelter for juvenile fish. Its tolerance of high nutrient-low light conditions, use of water column and benthic nutrients, and role as a foundation species make it an excellent candidate for cultivation and nutrient removal in the IRL. This project focused on evaluating C. prolifera as a nutrient removal treatment by quantifying C. prolifera’s uptake of ammonium (NH4+), nitrate and nitrite (NO3- and NO2-‑), and total dissolved nitrogen (TDN) and monitoring the treatment’s effect on pH and dissolved oxygen (DO). C. prolifera segments were collected from the IRL and cultivated in a flow-through aquaculture system with pH-neutral sand, filtered estuary water, and full-spectrum light (Fig.1). Since C. prolifera’s morphology is light-dependent, only cultivated new growth was transferred to the flow-through treatment and control chambers.
Developing a programmable continuous-flow pump system was a significant challenge. Although affordable DC motor pumps are available, the flow rate is intermittent and less precise. High precision multiheaded pumps are also available but were cost-prohibitive for this study. A custom stepper motor pump system was developed to provide a precise, continuous, and adjustable flow rate that was consistent in all chambers (Fig.1). A dissolved oxygen and pH sensor collected readings every five minutes. Water samples were collected sequentially every five days to confirm complete water exchanges between samples, filtered (0.4µm pore size), and analyzed using a SEAL AA3 HR Continuous Segmented Flow Auto Analyzer. Future research should be focused on the effect of aeration and variable light intensities.
Post-Combustion Carbon Capture for Marine Shipping Applications
Team Lead: Alice Pennings
Faculty Advisor(s): Dr. K. Lindeman
Electrical discharges in air and CO2 in non-planar geometries
Team Lead: Jared Nelson
Team Members: Allura Haddad, Alyssa Carson
Faculty Advisor(s): Jeremy A Riousset
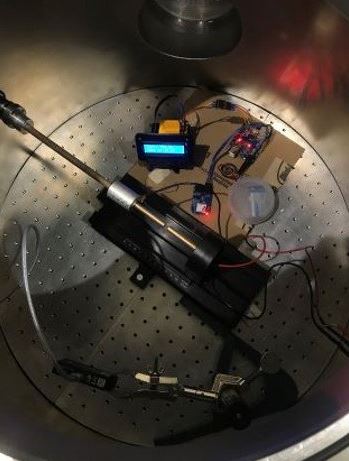
Dielectric breakdowns, i.e., electric discharges, can be formulated through Paschen’s law as non-thermal, selfsustained discharges occurring in high voltage, low current, and low-pressure conditions between two parallel plate electrodes. Although Paschen’s law has been adapted for various gas mixtures, it fails to account for electrode orientation and material type. The voltage required to initiate an electric discharge is commonly characterized by the Engel-Steenbeck equation: , where , A and B are empirically determined coefficients for each gas mixture, and is the secondary electron emission (S.E.E) from Friedmann & Kennedy (2004). However, we propose to develop a new formalism for the equations adapted to the constraints of electrode geometry and material type, as well as an experimental setup for its validation. Using Florida Tech’s micro Terrestrial Atmosphere Discharge Simulator (μTADS), the critical (initiation) voltage is measured at specific pressures and distances in air and CO2 mixtures comparable to Earth and Mars atmospheres.
The discharges are created using a HVDC multiplier connected to a DC variable voltage generator. The breakdowns occurred between several non-planar geometries, in specific cylindrical and point to plane. For the cylindrical geometries, several material types of steel, brass, and aluminum are tested, and it was found that the most responsive metal to the discharges was steel. Using a combination of a DS 602 Diffusion pump and an Agilent Varian Turbo Pump, the (µTADS) chamber was pressurized to a range of 0.5- 14 Torr as seen in Figure 1. The pressure and temperature of the chamber measured and displayed by an arduino uno circuit and AMS-5812-0150-A absolute pressure sensor. Several flanges were machined to allowed for high voltage access, camera feed through, and variable probe access. The experimental critical voltage values were recorded and plotted against the Engel-Steenbeck equation, to show the influence of the secondary electron emission. The experiments were conducted with two different power supplies, the in-house supply created an arc discharge and the stable HVDC supply created a glow discharge. The values of the different discharges are plotted to show the variation in voltages required to initiate them as seen in Figure 2. Typically, the range that the secondary electron emission lies is between to from Raizer et al. (1997). The experimental data follows the higher end of this range at . However, the calculate through the Engel-Steenbeck equations puts the Paschen Curve at the lower range of as seen in Figure 3. Thus, showing that the current representative equation of gas discharges presented as the Engel-Steenbeck equation does not accurately describe the curvature, location, or behavior of discharges that are not considered parallel plates.