
/prod01/fit-cdn-pxl/media/header-images/showcase-header.jpg)
Awards 2026
President's Cup
Conservation of Stress and Immune Gene Families Across Major Aquaculture Fish Species
Team Leader(s)
Julia PearsonTeam Member(s)
Rana Alghorir, Maryam Young, Abby Briggs, Sonia PetersFaculty Advisor
Dr. Ralph TurniganConservation of Stress and Immune Gene Families Across Major Aquaculture Fish Species File Download
Project Summary
This project investigates whether key stress and immune gene families are shared across aquaculture and wild fish species. By analyzing genes such as HSP70, HSP90, SODs, GSTs, and MHC Class I and II, we found that core stress genes are consistent across all species, while immune genes vary but are present in all. These results suggest that many fish may have the genetic capacity to succeed in aquaculture.Project Objective
To determine whether core stress and immune genes are conserved across aquaculture fish species and whether this shared genomic basis supports broader viability for aquaculture.Manufacturing Design Methods
Genomic data from multiple fish species were complied using FishBase and analyzed using R. Gene families related to stress response and immune function were compared across aquaculture and wild species.Analysis
Core stress genes were consistently present across all species, while immune genes showed some variation in copy number but were present in every species. No major differences were found between aquaculture and wild fish in these gene families.Future Works
Conduct controlled experiments to test whether species with similar gene profiles show similar responses to stress by measuring gene expression, survival rates, and physiological indicators.Acknowledgement
We thank our faculty advisor, Dr. Turnigan, and the Department of Ocean Engineering and Marine Sciences at Florida Institute of Technology for their guidance and support.CALI - Cobot Autonomous Living Interface

Team Leader(s)
Nicholas SantamariaTeam Member(s)
Heber Lopez, Berke DoganFaculty Advisor
Dr. Edward L. CarawayCALI - Cobot Autonomous Living Interface File Download
Project Summary
The CALI (Computer-Assisted Living Interface) system is a low-cost, assistive robotic feeding solution designed to improve independence for individuals with motor impairments. Built on the AR4 6-DOF robotic arm platform, the system integrates computer vision, depth sensing, and custom control software to detect food items, track user position, and autonomously guide a utensil for feeding. A neural network processes visual data in real time, enabling accurate food localization, while a depth camera provides spatial awareness for safe and precise motion. The system is controlled through a custom user interface and implemented using ROS 2 (Robot Operating System 2) for modular, scalable operation. By combining accessible hardware with intelligent software, CALI demonstrates a practical and affordable approach to assistive robotics, with strong potential for further development in healthcare and at-home support applications.Project Objective
The objective of the CALI project is to design and develop a low-cost, assistive robotic feeding system that enables individuals with motor impairments to eat independently and safely. This system aims to integrate computer vision, depth sensing, and robotic manipulation to detect food, track user position, and execute precise, autonomous movements using a 6-DOF robotic arm. A key goal is to create a modular and scalable platform controlled through a custom user interface and built on ROS 2, allowing for real-time operation and future expansion. Ultimately, the project seeks to demonstrate that advanced assistive technology can be both accessible and effective, providing a practical foundation for further development in healthcare and at-home support environments.Manufacturing Design Methods
The CALI system was developed using an iterative design process that combined mechanical fabrication, electronics integration, and software testing to create a functional assistive feeding prototype. The project was built around the AR4 robotic arm platform, with custom-designed components modeled in CAD and fabricated primarily through 3D printing to support rapid prototyping, low cost, and easy modification. Multiple utensil-mount concepts and support components were designed, tested, and refined to improve fit, usability, and overall appearance, including custom housings and attachments tailored to the system’s needs. On the electrical and control side, the design integrated depth-sensing hardware, embedded control components, and a custom interface to connect sensing, processing, and robotic motion into a single system. Throughout development, subsystems were repeatedly evaluated and adjusted based on testing results, allowing the team to improve reliability, functionality, and manufacturability while maintaining a modular design approach.Specification
The CALI system is designed as a 6-degree-of-freedom (6-DOF) assistive robotic platform built on the AR4 robotic arm, capable of precise and repeatable motion suitable for feeding tasks. The system operates using stepper motor-driven joints with encoder feedback for improved positioning accuracy, achieving sub-centimeter end-effector precision within its working envelope. A depth-sensing camera provides real-time spatial data, enabling accurate food localization and user tracking within a typical operating range of approximately 0.2 to 1.0 meters. The control architecture is implemented using ROS 2, allowing modular communication between perception, planning, and actuation nodes. The vision system utilizes a trained neural network for object detection, running on a standard computing platform capable of real-time inference. Custom 3D-printed PLA components are used for the utensil mount and protective enclosures, ensuring lightweight and cost-effective fabrication. The system is powered by standard DC power supplies and interfaces with a custom-built user interface for manual control, calibration, and automated operation modes.Analysis
The CALI system demonstrates that a low-cost, modular assistive robotic platform can effectively integrate computer vision, depth sensing, and robotic control to perform feeding tasks with reasonable accuracy and reliability. By leveraging ROS 2, the system achieves real-time communication between perception and actuation, validating the feasibility of combining modern software frameworks with accessible hardware like the AR4 arm. While testing showed strong performance in detecting food and guiding motion, limitations such as sensitivity to lighting conditions, system latency, and the inherent constraints of a non-human-centered robotic platform highlight areas for improvement. Overall, the project confirms the potential for affordable assistive robotics while identifying key opportunities for enhancing robustness, safety, and user adaptability.Future Works
Future work for the CALI system will focus on improving reliability, safety, and user adaptability to move closer to real-world deployment. Enhancements to the computer vision pipeline, including more robust neural network training and expanded datasets, will improve accuracy across varying lighting conditions and a wider range of food types. Reducing system latency through optimized processing and more efficient communication within ROS 2 will enable smoother and more responsive motion. Mechanical upgrades to the AR4 platform, such as improved safety features, softer end-effectors, and more ergonomic utensil designs, will make the system better suited for direct human interaction. Additional developments may include user-specific calibration profiles, voice or gesture-based controls, and expanded autonomy for tasks beyond feeding. Ultimately, future iterations aim to refine the system into a more robust, intuitive, and clinically viable assistive technology.Acknowledgement
The team would like to thank the Machine Learning Team (Aruna Dookeran, Michael Yanke, Kari Voelstad Bogen, Levent Kahveci), as well as Dr. Caraway and TA Elis for their support throughout the senior design process.
Northrop Grumman Best in Show Awards
Studies of a Mitigation Strategy for Carrington class superflares
Team Leader(s)
José FuentesTeam Member(s)
José Fuentes, Camilla WrightFaculty Advisor
Manasvi LingamSecondary Faculty Advisor
Juan Carlos PalaciosStudies of a Mitigation Strategy for Carrington class superflares File Download
Project Summary
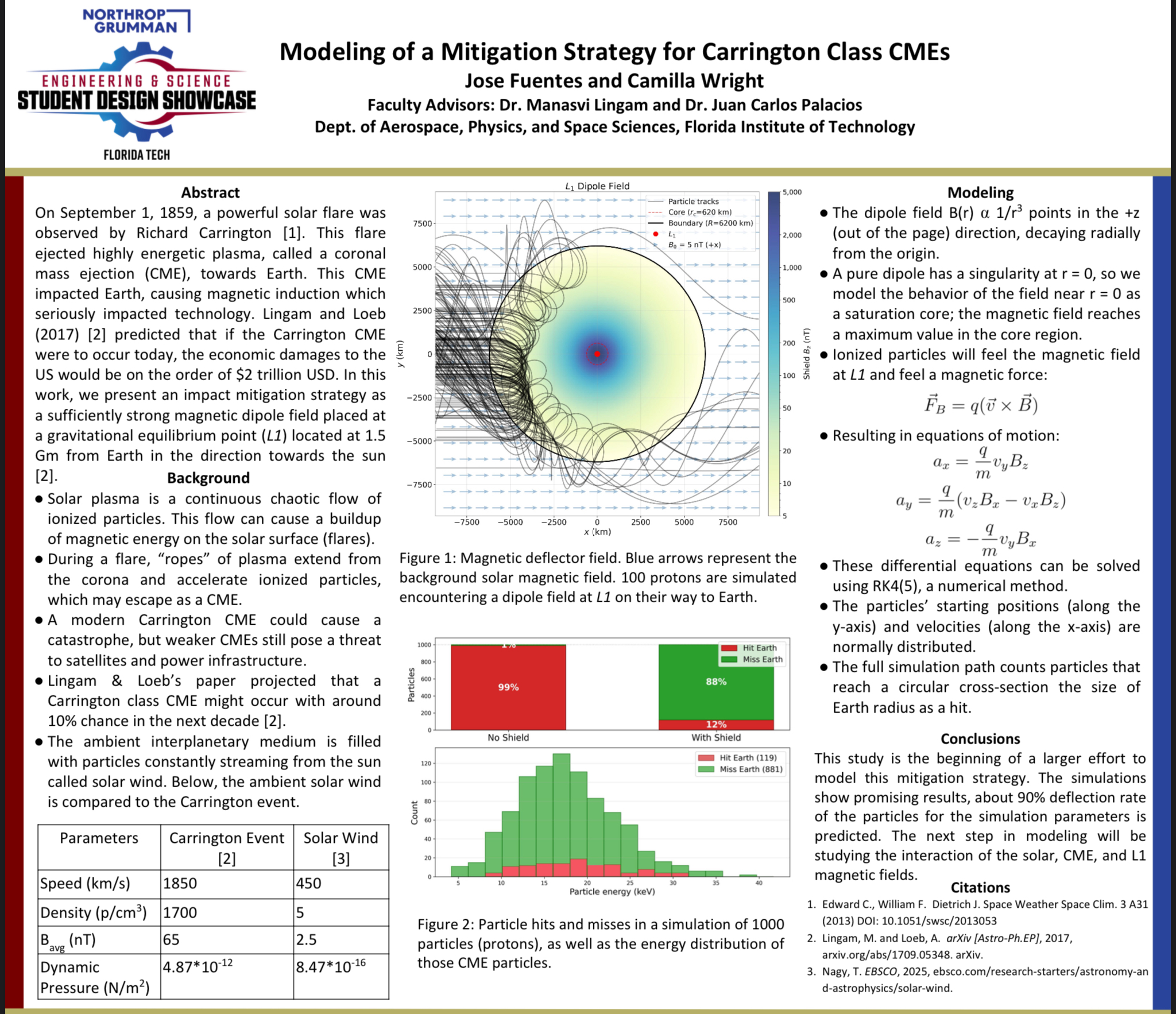
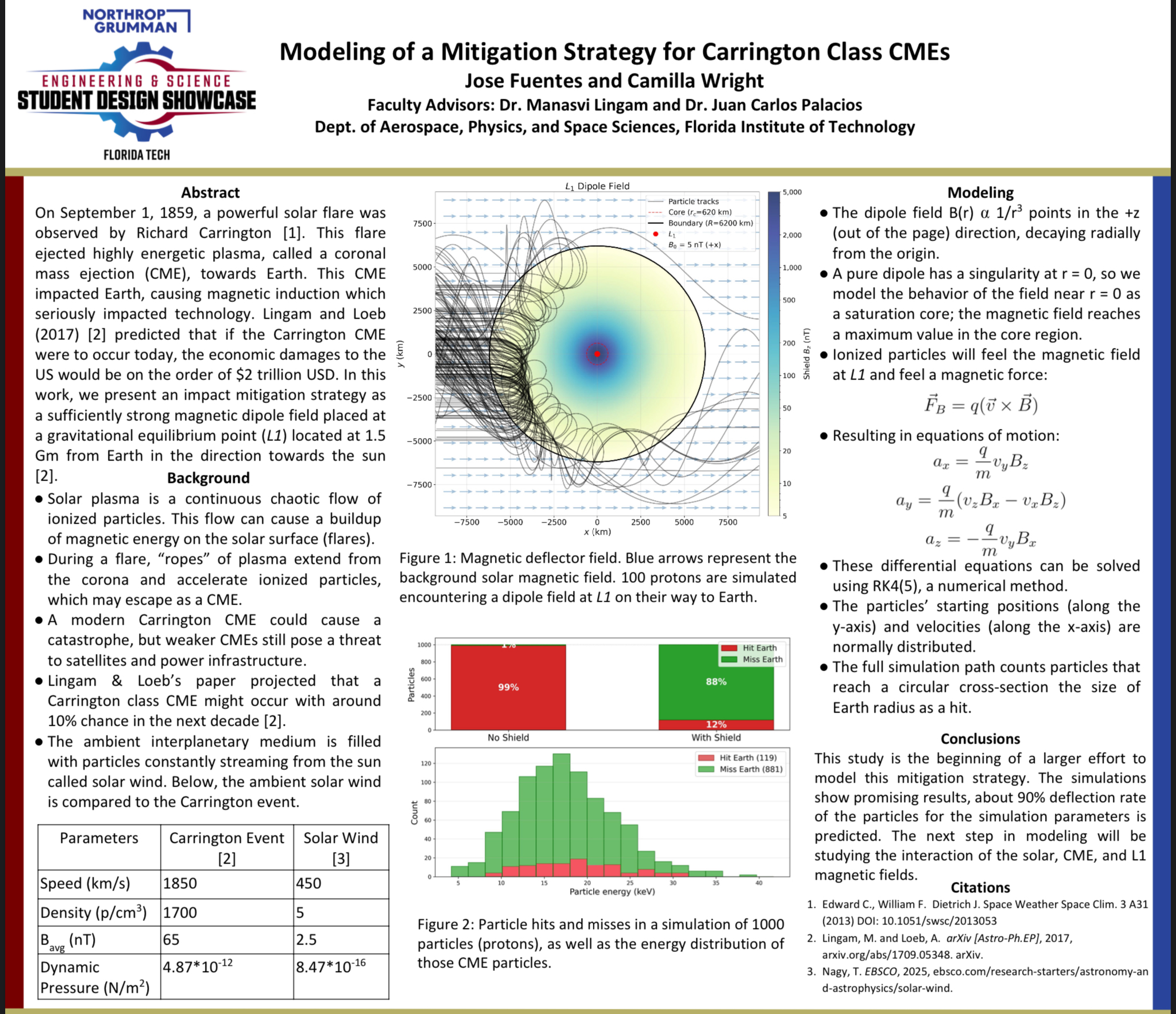
On September 1, 1859, a powerful solar flare was observed by Richard Carrington [1]. This flare ejected highly energetic plasma, called a coronal mass ejection (CME), towards Earth. This CME impacted Earth, causing magnetic induction which seriously impacted technology. Lingam and Loeb (2017) [2] predicted that if the Carrington CME were to occur today, the economic damages to the US would be on the order of $2 trillion USD. In this work, we present an impact mitigation strategy as a sufficiently strong magnetic dipole field placed at a gravitational equilibrium point (L1) located at 1.5 Gm from Earth in the direction towards the sun [2]A.S.T.R.A. (Atmospheric-Satellite-Trajectory-Repositioning-Attachment)

Team Member(s)
Liam Pettit, Morgan Lee, Nathan Mulford, Alvaro Cameo, Cole Schumacher, Nathan Stephens, Jimmy Maskill, Titus Mills, Clayton Cannella, Evan ThompsonFaculty Advisor
Dr. Camilo Riano-Rios, Dr. Eric Swenson, Dr. Firat IrmakProject Summary
Project A.S.T.R.A. is a CubeSat attachment with the goal of modulating its orbital drag to achieve desired orbital maneuvers such as debris avoidance and controlled deorbiting. Once injected into its desired orbit, the attachment will automatically enter sleep mode to reduce power consumption when not in operation. When ready, the user will send a command to the attachment to deploy. At this time, deployment begins with two plates attached to gears on either side of a worm-gear stepper motor, which actuate upwards slightly to reveal a folded mylar sail. On each plate are 2 wounded metal booms constrained by a spool and a clear, filament wire. The wire restrains the spools from unwinding and is tied around a very thin ‘burn wire’. Once in this position, the flight computer sends a high current through the burn wire, heating it and melting through the filament wire. The booms are then free to rotate and shoot out in a V-shape. This, in turn, also pulls out the mylar sail. At this phase, there are two large triangle-shaped sails on either side of the attachment, and the user can modulate the sails to any angle to achieve a desired cross-sectional area/drag. The attachment also includes light sensors that can verify deployment by measuring the shadows cast by the sails. The attachment also includes various sensors that relay status and other telemetry to the user, such as power usage and temperature.Project Objective
Project A.S.T.R.A. proposes a solution to this problem via an expandable CubeSat attachment capable of modulating atmospheric drag to perform orbital maneuvers. This drag-based control mechanism aims to facilitate orbital adjustments such as debris avoidance and controlled deorbit. This method of control enables these maneuvers without the use of propulsion systems. Team A.S.T.R.A. chose to design this concept as an attachment to enable integration with a greater number of CubeSats, aiming for a greater overall impact in the space vehicle industry. Project A.S.T.R.A will directly support global efforts to mitigate growing space debris concerns and promote long-term orbital sustainability.Manufacturing Design Methods
The A.S.T.R.A. CubeSat attachment was designed, assembled, and tested at the L3Harris Student Design Center (HSDC). All aluminum components, such as the frame and mounting pieces, were manufactured at the Machine Shop. The onboard computer (Pi4) and stepper were ordered externally and mounted into the frame. Each electronic component was ordered externally, tested, and finally soldered onto a custom-designed PCB. The PCB was connected to the Pi4 via pin-header extensions, and JST connectors were used to connect the stepper motor and various external sensors to the PCB.Specification
The CubeSat was constrained to a 2U volume (10x10x20cm), 2.66 kg, operating below 20 watts, and able to modulate its cross-sectional area, with respect to the direction of motion, to 0.5 m^2. These constraints ensure the design is as accurate as possible to a real-life CubeSat, further proving the concept’s viability. The additional cross-sectional area is expected to decrease the deorbit time at 400 km altitude from ~340 days to just ~12 days. This drastically reduces total deorbit time and allows the user more control over their trajectory. The CubeSat frame is also designed to withstand launch conditions, including stress and vibrations, and to meet the launch provider (NanoRacks) geometric specifications.Future Works
Other solutions for area expansion could also be researched, with the purpose of achieving a higher area ratio or increased reliability. Future work on the A.S.T.R.A. concept would expand upon the concept of sail stowage and improve deployment reliability. Additional improvements include a possible burn-wire tensioner and a method for detecting sail position during a mid-operation restart. The incorporation of space-grade materials and components would also further prove the concept's viability in real-world applications.Acknowledgement
The ASTRA team would like to thank Dr. Camilo Riano-Rios, Dr. Eric Swenson, and Dr. Firat Irmak for their guidance and technical contributions throughout the project. Recognition also goes to the staff of the Florida Tech L3Harris Student Design Center, including Felix Gabriel, Zac Schardt, and Royce Jacobs, for their guidance and support. The team also acknowledges the Florida Institute of Technology for providing the facilities and resources needed to design and construct project ASTRA.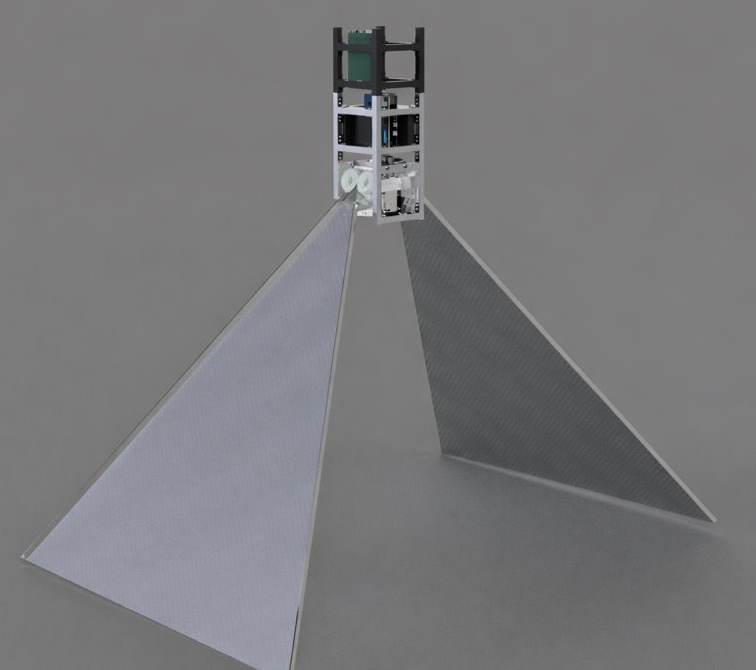
Honors College Award
Dual-Lev: A Dual-Axis Ultrasonic Acoustic Levitator
Team Member(s)
Trevor Hennington, Alyx MasonFaculty Advisor
Dr. Souvik DasDual-Lev: A Dual-Axis Ultrasonic Acoustic Levitator File Download
Project Summary
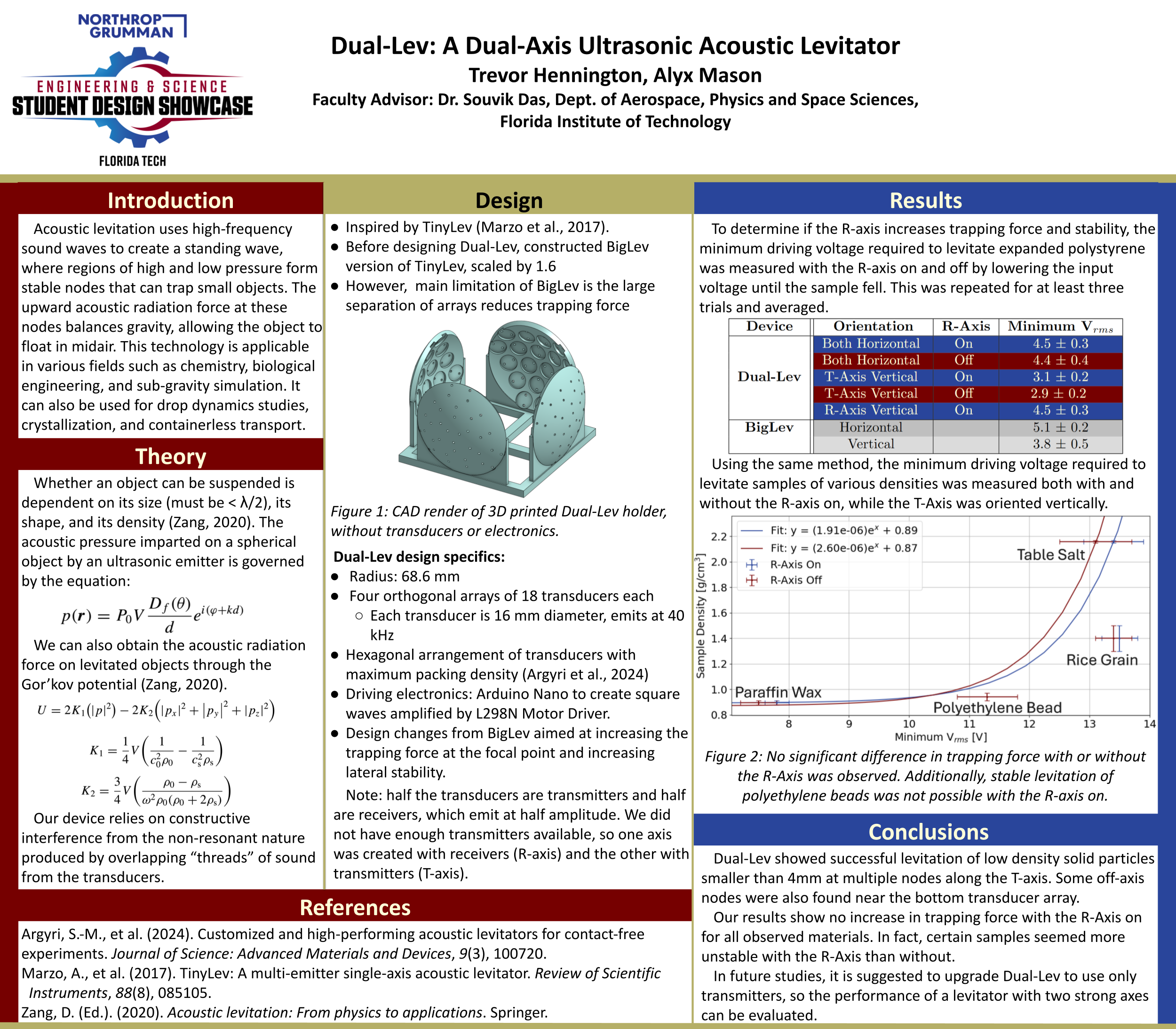
Acoustic levitation uses high-frequency sound waves to create a standing wave, where regions of high and low pressure form stable nodes that can trap small objects. The upward acoustic radiation force at these nodes balances gravity, allowing the object to float in midair. This technology is applicable in various fields such as chemistry, biological engineering, and sub-gravity simulation. It can also be used for drop dynamics studies, crystallization, and containerless transport. Dual-Lev investigates the capability of a levitator which utilizes four orthogonal arrays of ultrasonic transducers to produce two sound emitter axes rather than the more traditional setup of two opposing transducer arrays creating a single emitter axis.Specification
Dual-Lev consists of four orthogonal arrays of 18 transducers each, for a total of 72 transducers. Each array is separated from its opposing array by 68.6 mm, and the transducers are placed in a hexagonal arrangement which maximizes packing density. Driving electronics: An Arduino Nano creates 40 kHz square waves which are then amplified by a L298N motor driver. The whole device is powered by a 12 V DC wall adapter, and the input voltage can be adjusted via a DC boost converter. Transducer Specifications:16 mm diameter, emit sound waves at 40 kHz, maximum driving voltage of 40 V peak-to-peak, either transmitter or receiver type. Receiver type transducers only emit at approximately half the amplitude of transmitter types. The two types of transducers are typically sold together, and unfortunately budget constraints required that receiver types were used in Dual-Lev. It was decided that one axis would use only transmitters, while the other would use receivers. The transmitter axis primarily creates the force which opposes gravity, while the receiver axis supports by increasing the lateral trapping force.Analysis
The performance of Dual-Lev was measured by determining the minimum driving voltage required to levitate samples at various densities. These experiments were performed with the secondary axis both on and off so that its effect on the total trapping force could be evaluated. Unfortunately, no decrease in minimum driving voltage was observed when the secondary axis was turned on. Furthermore, the stability of asymmetric samples decreased with the secondary axis turned on.Future Works
In future studies, it is suggested to upgrade Dual-Lev to use only transmitter type transducers, so the performance of a levitator with two equally strong axes can be evaluated.Acknowledgement
Our device was inspired by the TinyLev design created by Asier Marzo, Adrian Barnes, and Bruce W. Drinkwater at the University of Bristol.A.S.T.R.A. (Atmospheric-Satellite-Trajectory-Repositioning-Attachment)
Team Member(s)
Liam Pettit, Morgan Lee, Nathan Mulford, Alvaro Cameo, Cole Schumacher, Nathan Stephens, Jimmy Maskill, Titus Mills, Clayton Cannella, Evan ThompsonFaculty Advisor
Dr. Camilo Riano-Rios, Dr. Eric Swenson, Dr. Firat IrmakProject Summary
Project A.S.T.R.A. is a CubeSat attachment with the goal of modulating its orbital drag to achieve desired orbital maneuvers such as debris avoidance and controlled deorbiting. Once injected into its desired orbit, the attachment will automatically enter sleep mode to reduce power consumption when not in operation. When ready, the user will send a command to the attachment to deploy. At this time, deployment begins with two plates attached to gears on either side of a worm-gear stepper motor, which actuate upwards slightly to reveal a folded mylar sail. On each plate are 2 wounded metal booms constrained by a spool and a clear, filament wire. The wire restrains the spools from unwinding and is tied around a very thin ‘burn wire’. Once in this position, the flight computer sends a high current through the burn wire, heating it and melting through the filament wire. The booms are then free to rotate and shoot out in a V-shape. This, in turn, also pulls out the mylar sail. At this phase, there are two large triangle-shaped sails on either side of the attachment, and the user can modulate the sails to any angle to achieve a desired cross-sectional area/drag. The attachment also includes light sensors that can verify deployment by measuring the shadows cast by the sails. The attachment also includes various sensors that relay status and other telemetry to the user, such as power usage and temperature.Project Objective
Project A.S.T.R.A. proposes a solution to this problem via an expandable CubeSat attachment capable of modulating atmospheric drag to perform orbital maneuvers. This drag-based control mechanism aims to facilitate orbital adjustments such as debris avoidance and controlled deorbit. This method of control enables these maneuvers without the use of propulsion systems. Team A.S.T.R.A. chose to design this concept as an attachment to enable integration with a greater number of CubeSats, aiming for a greater overall impact in the space vehicle industry. Project A.S.T.R.A will directly support global efforts to mitigate growing space debris concerns and promote long-term orbital sustainability.Manufacturing Design Methods
The A.S.T.R.A. CubeSat attachment was designed, assembled, and tested at the L3Harris Student Design Center (HSDC). All aluminum components, such as the frame and mounting pieces, were manufactured at the Machine Shop. The onboard computer (Pi4) and stepper were ordered externally and mounted into the frame. Each electronic component was ordered externally, tested, and finally soldered onto a custom-designed PCB. The PCB was connected to the Pi4 via pin-header extensions, and JST connectors were used to connect the stepper motor and various external sensors to the PCB.Specification
The CubeSat was constrained to a 2U volume (10x10x20cm), 2.66 kg, operating below 20 watts, and able to modulate its cross-sectional area, with respect to the direction of motion, to 0.5 m^2. These constraints ensure the design is as accurate as possible to a real-life CubeSat, further proving the concept’s viability. The additional cross-sectional area is expected to decrease the deorbit time at 400 km altitude from ~340 days to just ~12 days. This drastically reduces total deorbit time and allows the user more control over their trajectory. The CubeSat frame is also designed to withstand launch conditions, including stress and vibrations, and to meet the launch provider (NanoRacks) geometric specifications.Future Works
Other solutions for area expansion could also be researched, with the purpose of achieving a higher area ratio or increased reliability. Future work on the A.S.T.R.A. concept would expand upon the concept of sail stowage and improve deployment reliability. Additional improvements include a possible burn-wire tensioner and a method for detecting sail position during a mid-operation restart. The incorporation of space-grade materials and components would also further prove the concept's viability in real-world applications.Acknowledgement
The ASTRA team would like to thank Dr. Camilo Riano-Rios, Dr. Eric Swenson, and Dr. Firat Irmak for their guidance and technical contributions throughout the project. Recognition also goes to the staff of the Florida Tech L3Harris Student Design Center, including Felix Gabriel, Zac Schardt, and Royce Jacobs, for their guidance and support. The team also acknowledges the Florida Institute of Technology for providing the facilities and resources needed to design and construct project ASTRA.Universal Mandated Reporting of Suspected Child Maltreatment: Knowledge and Decision-Making for Child Advocacy Studies (CAST) and Non-CAST
Team Member(s)
Sophia WeathersFaculty Advisor
Dr. Travis ConradtUniversal Mandated Reporting of Suspected Child Maltreatment: Knowledge and Decision-Making for Child Advocacy Studies (CAST) and Non-CAST File Download
Project Summary
Florida is one of eighteen U.S. states with universal mandated reporting laws, requiring all citizens to report child maltreatment. However, most research has focused on professional mandated reporters, with limited attention to how non-professionals interpret and respond to suspected child maltreatment. This study examined the effects of training using the Child Advocacy Studies (CAST) minor and compared three groups of students, including a general student sample, a pre-CAST group, and a post-CAST group. Participants' knowledge, attitudes, reasonable suspicion judgments, and reporting decisions were assessed using statutorily developed child maltreatment scenarios. Post-CAST students demonstrated significantly greater mandated reporting knowledge, more positive mandated reporting attitudes, and a lower threshold for reasonable suspicion compared to both the general and pre-CAST student samples. Pre-CAST students demonstrated significantly greater knowledge than the general student sample. Although correct reasonable suspicion determinations did not differ significantly across the three groups, the general student sample reported significantly fewer child maltreatment scenarios to CPS. Overall, this suggests that non-professionals appear capable of recognizing circumstances that meet the threshold for reasonable suspicion, but training is critical for translating recognition into appropriate mandated reporting action.Project Objective
To develop and use statutorily guided child maltreatment vignettes reflecting scenarios non-professionals may reasonably encounter to assess reasonable suspicion judgments and reporting decisions and compare outcomes across training levels.Best in Show Awards
ARGOS

Team Leader(s)
Sophia Cherry, Tyler DavisTeam Member(s)
Seth Busche, DJ Benefield, Priyansh Dholakia, Nathan Scott, Jonathan FelizFaculty Advisor
Dr. Firat IrmakSecondary Faculty Advisor
Dr Eric Swenson and Dr. Ryan WhiteProject Summary
The Advanced Robotic Gimbal and Orbital Simulator (ARGOS) project aims to design and construct a modular mock satellite and a three-degree-of-freedom (3-DOF) test stand that together replicate realistic satellite dynamics in a controlled laboratory environment. The system is intended to support research in satellite identification, servicing, and AI-assisted docking. These research areas require an accurate and repeatable method for simulating the motion of unresponsive or tumbling satellites. By providing this capability in a ground-based environment, ARGOS enables the study of satellite behavior in a safe and cost-effective manner, eliminating the need for expensive on-orbit testing. The project is motivated by challenges related to satellite failures, limited reusability, and the increasing volume of space debris. Servicing or retrieving satellites in orbit remains extremely costly, and existing laboratory tools often lack modularity, restricting researchers’ ability to test multiple satellite configurations or sensor arrangements. This creates a gap in modern research platforms for evaluating docking algorithms, satellite identification techniques, and recovery or repair strategies for unresponsive spacecraft. ARGOS addresses this need by providing a flexible and repeatable experimental platform capable of recreating a wide range of satellite behaviors. The project scope includes the development of mechanical, electrical, and software subsystems required to implement a gimbaled test stand and interchangeable satellite modules. The team follows a structured engineering design process, beginning with customer requirements and progressing through modeling, component selection, prototyping, and system verification. Design decisions are guided by customer needs, academic requirements, engineering standards, and constraints on time and budget. The customer, Dr. White, defines functional expectations such as system performance, size, and modularity. Since the system will support ongoing research in satellite dynamics, reusability, and AI-assisted docking, long-term usability is a key design consideration. The academic advisor, Dr. Irmak, ensures alignment with Florida Tech’s senior design standards. At project completion, the ARGOS team will deliver the full system assembly, CAD models, and supporting documentation. ARGOS aims to advance technologies that reduce space debris and improve the sustainability of future space missions.Project Objective
OBJ-01. Design and construct a system capable of simulating a tumbling satellite. OBJ-02. Design a system with at least three degrees of freedom. OBJ-03. Develop modular components that represent real-world satellite buses. OBJ-04. Implement a graphical user interface (GUI). OBJ-05. Develop a maintenance and repair guide for the system. OBJ-06. Perform a full system simulation prior to the senior design showcase.Manufacturing Design Methods
Mechanical System * Six linear actuators and one rotary actuator provide three degrees of freedom * Rigid top plate for payload mounting * Modular satellite bus configuration * Designed for stability, stiffness, and minimal vibration Electrical and Hardware System * Power: 120V AC converted to 48V DC * Microcontroller: Raspberry Pi Pico * Inclinometer: Adafruit BNO055 * Actuator communication via PWM Controls and Software * Maintain system stability while tracking commanded roll and pitch, with continuous yaw rotation * Closed-loop feedback using IMU orientation data * Inverse kinematics for actuator control mappingAnalysis
Finite Element Analysis (FEA) was conducted on all major structural components, including the star base, test stand, satellite bus, rotary actuator housing, top plate, bottom plate, all six linear actuators, and a custom U-joint. The system was evaluated under worst-case loading conditions, defined as the configuration in which a single actuator experiences maximum load across the full motion envelope of ±35° roll, ±35° pitch, and 360° yaw. MATLAB results identified the actuator subject to the highest load, the corresponding system orientation, the global center of mass of the combined rotary actuator and satellite mockup, actuator lengths, and actuator angles relative to the system.Future Works
* Improve control accuracy * Develop a robotic arm for interaction based on vision system algorithms * Increase system realism * Expand modular satellite attachments via 3D printing * Refine platform configuration * Implement a PID control algorithm Acknowledgement: The ARGOS Senior Design Team thanks our professor, Dr. Firat Irmak; our GSA, Niall D. Melbourne-Harris; our technical advisor, Dr. Eric D. Swenson; our customer, Dr. Ryan T. White; and the staff of the HSDC for their support in making this project possible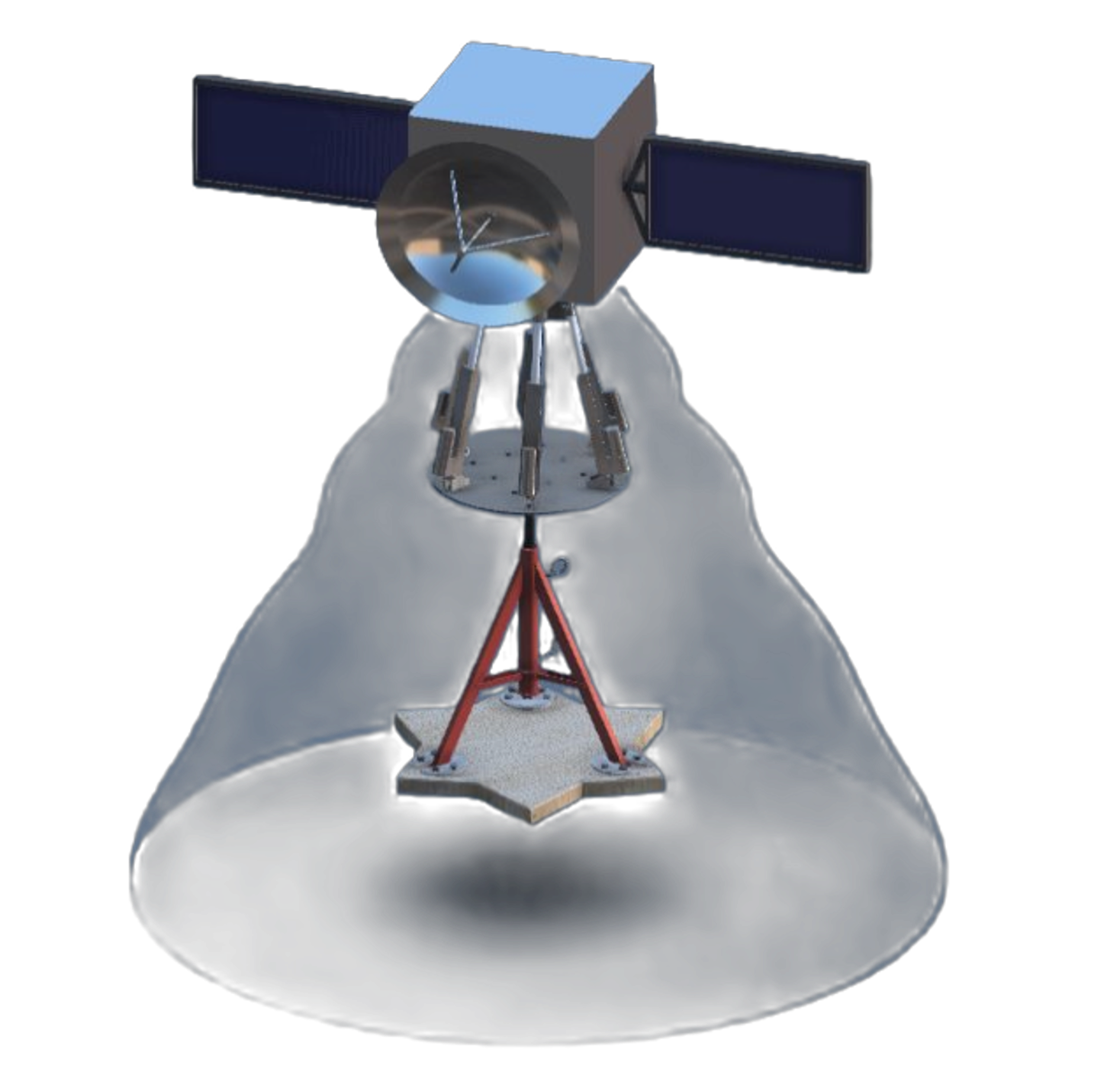
VitaSense
Team Leader(s)
Ava DorowTeam Member(s)
Ava Dorow, Ashley Schindler, Justin McParlandFaculty Advisor
Dr. Linxia GuSecondary Faculty Advisor
Dr. Sujoy Ghosh HajraVitaSense File Download
Project Summary
An imaging photoplethysmography (iPPG) pipeline is a fully automated MATLAB-based system used to extract physiological vitals like heart rate (HR), blood oxygen saturation (SpO2), and blood pressure from standard video recordings of a subject's face without any physical contact. It operates by detecting subtle, periodic color variations in facial skin caused by underlying blood flow, processing those signals through multiple extraction algorithms, spectral analysis, and filtering to produce accurate vital sign estimates. The system's motivation is to enable low-cost, non-invasive vital sign monitoring using only a camera, with validation against clinical-grade ECG ground-truth hardware.Large-Scale Production of Polyethylene Furanoate from Alage-Derived Feedstocks
Team Leader(s)
Anjolaoluwa BuraimaTeam Member(s)
Anjolaoluwa Buraima, Brianna Oropeza, Christain Jung , Jasmine GordonFaculty Advisor
Dr. R Chauncey SplichalProject Summary
Petroleum-based plastics are widely used across industries, but they present serious environmental and health challenges. These plastics are derived from non-renewable resources and are non-biodegradable, meaning they persist in the environment and cannot be broken down by microorganisms. Their large-scale production contributes to greenhouse gas emissions, while their accumulation, especially in marine ecosystems, leads to significant biodiversity loss. In response to these concerns, there has been a growing push toward renewable and sustainable alternatives. One promising solution is Polyethylene furanoate (PEF), a fully bio-based polymer. PEF offers performance comparable to or superior to that of conventional plastics, such as polyethylene terephthalate (PET), including improved mechanical strength, better thermal stability, and enhanced barrier properties, making it a potential replacement for petroleum-based plastics in the food and beverage industry. In this work, PEF is produced from microalgal feedstocks, which are converted into polymer precursors through a series of unique isolation techniques and carefully controlled chemical reactions. Because PEF can be synthesized from renewable resources, it represents a strong and more sustainable alternative to petroleum-based plastics, positioning it as a key material in the transition toward environmentally friendly polymer production.Project Objective
The goal of this project is to develop and optimize a sustainable process that converts microalgal feedstocks into Polyethylene furanoate (PEF). The design focuses on ensuring optimal process performance while maintaining the required barrier properties of the final polymer. This approach aims to deliver a steady, reliable supply of high-quality bio-based plastic precursors capable of replacing petroleum-derived Polyethylene terephthalate in the food and beverage industry, while reducing environmental impact and supporting the transition to renewable polymer systems.Manufacturing Design Methods
The process integrates reaction engineering and separation techniques to convert microalgal biomass into Polyethylene furanoate (PEF). Algae growth is modeled in a photobioreactor using a simplified photosynthetic reaction, with carbon capture from process CO₂ streams supporting sustained algal cultivation. The harvested biomass undergoes dewatering, mechanical cell disruption, and ethanol precipitation to isolate polysaccharides. These are hydrolyzed into glucose in a yield-based reactor, followed by acid-catalyzed dehydration to form 5-hydroxymethylfurfural (5-HMF). The 5-HMF is then oxidized to FDCA in a plug-flow reactor and purified by crystallization and centrifugation. Finally, FDCA is polymerized via step-growth polymerization to produce PEF, with the resulting polymer properties approximated due to software constraints.Future Works
Future work will focus on improving the accuracy and detail of polymerization modeling. Additional optimization of recycle streams, operating conditions, and separation efficiency will be explored to enhance overall process performance. Efforts will also be directed toward reducing overall process costs through improved material utilization and process simplification, as current production pathways remain relatively resource-intensive.Acknowledgement
We would like to acknowledge Dr.Splichal for his guidance, support, and valuable feedback throughout this project. His input was instrumental in shaping and improving our work, and we sincerely appreciate his time and expertise.College of Business Relocation Project
Team Leader(s)
Genevieve SpitalettoTeam Member(s)
Nicky Vreeland, Matthew Loudon, and Chris FoxFaculty Advisor
Dr Troy NguyenCollege of Business Relocation Project File Download
Project Summary
This project focuses on the relocation of the College of Business at Florida Institute of Technology by replacing outdated Academic quad buildings with a new six-story academic building. The existing structures are no longer capable of supporting modern academic, technological, and spatial needs, creating the need for a more efficient and functional solution. The proposed building is designed to provide updated classrooms, faculty offices, and collaborative spaces that enhance the learning environment while improving accessibility and campus integration. The project includes demolition, sitework, underground utilities, stormwater management through a retention pond, etc. Construction will take place within an active campus, requiring careful coordination of logistics, safety, and pedestrian access. With an estimated cost of approximately $20 million and a construction duration of 18-19 months, the project delivers a practical and buildable solution that supports Florida Tech’s long-term campus development and academic growth.Rapid Reach

Team Leader(s)
Peyton Hay, Ryan MatthewsTeam Member(s)
Rishi Ammanabrolu, Alex Dumbell, Peyton Hay, Ashley Hurtado, Ryan Matthews, Mac McHale, Sean Miller, Dan ZschauFaculty Advisor
Dr. E. Lee CarawayProject Summary
We developed an autonomous drone system to improve emergency response times for sudden cardiac arrest incidents on the Florida Tech campus. We identified that limited AED availability and reliance on bystander retrieval significantly delayed treatment, so we designed a quadcopter capable of delivering an AED within a half-mile in under three minutes. Our system integrated a centrally located Housing and Launch System (HLS) that stored and deployed the drone upon request, enabling rapid, on-demand response without requiring users to locate existing AEDs. We engineered the drone for reliability and efficiency, achieving a 2:1 thrust-to-weight ratio, stable autonomous flight, and GPS-based navigation with obstacle avoidance and failsafe behaviors. Through iterative CAD design, material optimization, and ANSYS simulations, we refined the structure using lightweight carbon fiber components while ensuring safety and compliance with FAA regulations. The final system demonstrated a scalable, cost-effective solution that could extend beyond campus use to broader emergency response applications, with the potential to significantly improve survival outcomes in time-critical situations. Problem Statement: Survival of out-of-hospital cardiac arrest depends on rapid heart defibrillation, yet automated external defibrillator (AED) retrieval, high acquisition costs, and maintenance requirements often limit unit availability. Consequently, the delay inherent in traditional manual retrieval and EMS arrival frequently prevents aid from reaching victims in time.Project Objective
Our primary objective was to design, build, and test an autonomous drone system capable of delivering an AED within a half-mile radius in under three minutes. We also aimed to ensure the system was always mission-ready through a centralized housing and launch system that maintained power, protection, and communication capabilities. Additional objectives included meeting safety and regulatory requirements and staying within the project budget.Future Works
For future development, we planned to enhance the system’s reliability and usability by integrating advanced obstacle detection capabilities, allowing the drone to dynamically identify and avoid unexpected hazards during flight. We also aimed to implement real-time automated flight planning, enabling the drone to adjust its route on-the-fly based on environmental conditions or mission constraints rather than relying solely on pre-programmed paths. Additionally, we proposed the development of a user-facing application for dispatch and tracking, which would allow emergency requests to be initiated quickly while providing live updates on drone status and location, improving overall system responsiveness and user confidence.Acknowledgement
Special thanks to Elis Karcini, Felix Gabriel, Dr. Firat Irmak, Terence Lee, and Alex Lacy for their contributions and assistance with this project.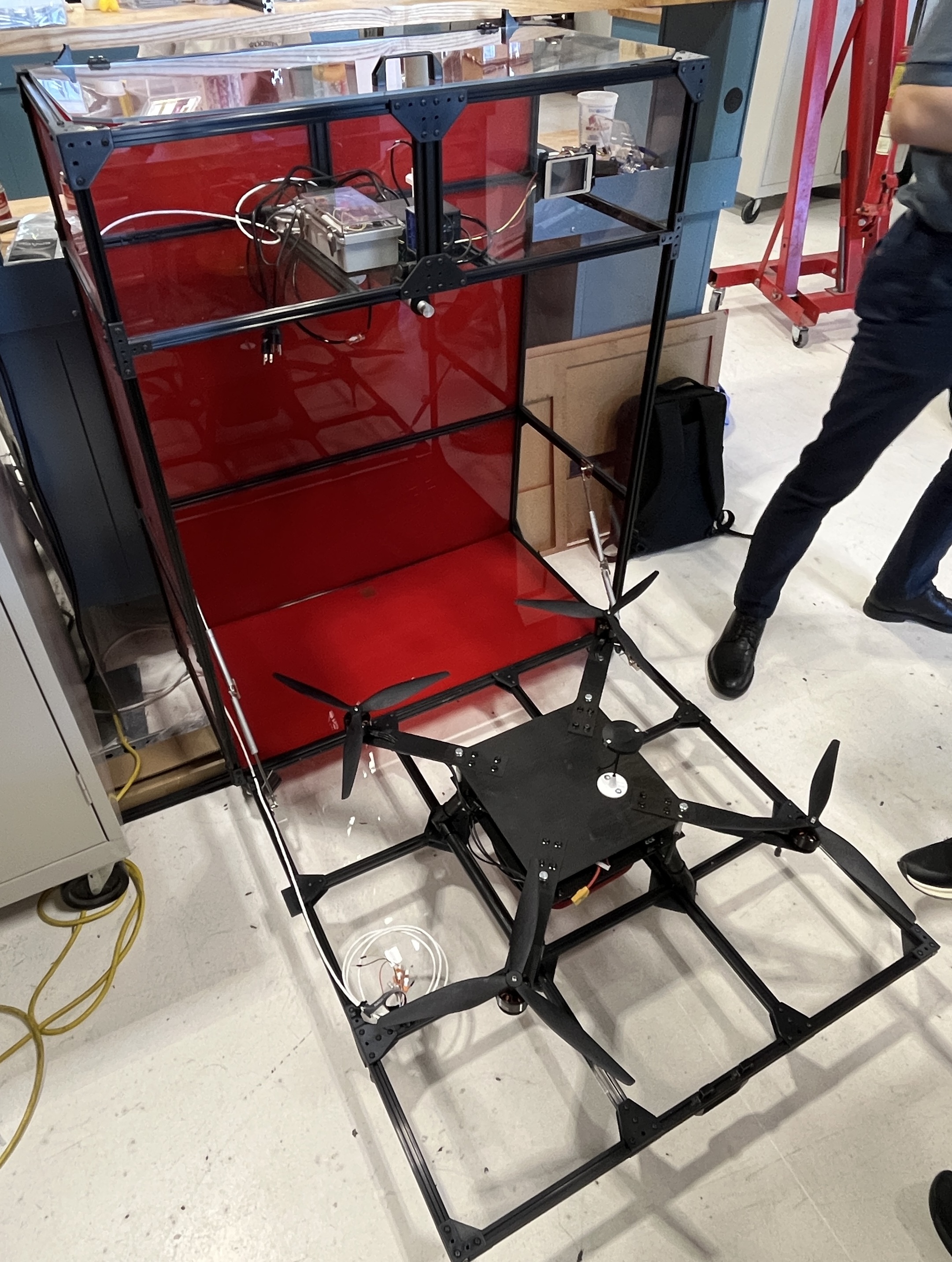
Recycling Spent Brewing Yeast as a Shrimp Feed Supplement
Team Leader(s)
John DenvirTeam Member(s)
John DenvirFaculty Advisor
Dr. Emily RalstonRecycling Spent Brewing Yeast as a Shrimp Feed Supplement File Download
Project Summary
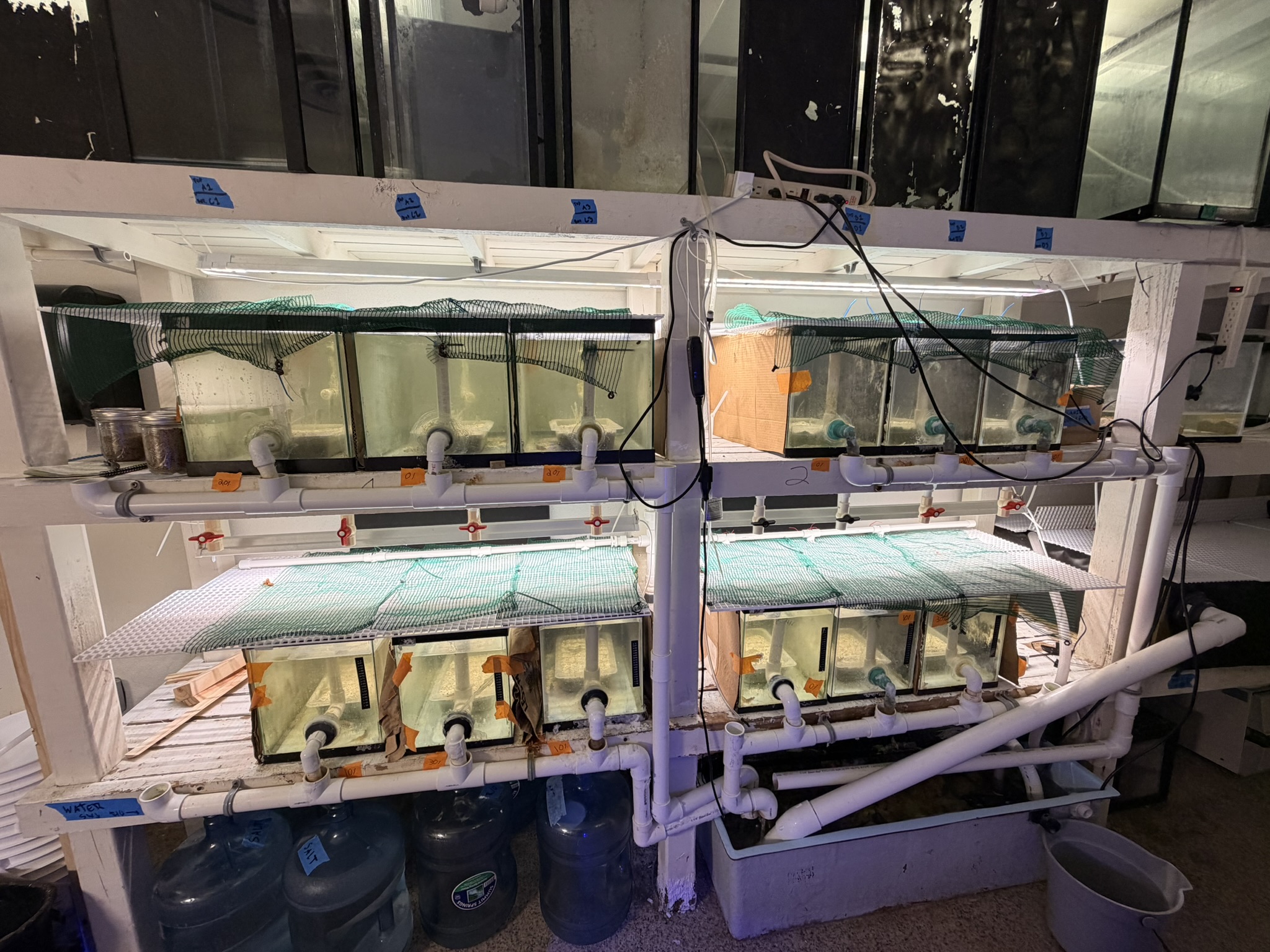
Commercial fish feed represents over half of all production costs in the aquaculture industry, restricting farm profitability across global markets. Breweries compound this resource challenge by generating roughly three gallons of high-strength wastewater for every gallon of beer produced, with much of that volume discarded as spent yeast that depletes oxygen levels in receiving waterways. This project addresses both constraints by converting brewery waste into a viable feed supplement, testing whether spent brewer's yeast can reduce aquaculture input costs while diverting pollutants from marine systems. The processing phase began with collecting several gallons of spent yeast from Intracoastal Brewing Company. Thin layers were spread across silicon trays and dehydrated at 140°F for eight hours, yielding a stable dry product suitable for long-term storage. The dried yeast was ground and mixed with commercial Zeigler SI shrimp feed at three concentration levels: 10%, 20%, and 30% yeast by weight, with a 0% control treatment using only commercial feed. Each mixture was pelletized and distributed across randomized replicate tanks, with four to five shrimp of similar size and age assigned to each treatment group. Salinity, temperature, lighting, and aeration remained constant throughout the trial period. Behavioral observations during feeding revealed a clear preference pattern tied to yeast concentration. Shrimp in the 0% control tanks actively avoided their feed, spitting out pellets or moving to other areas of the tank to graze on algae forming on rocks. All control feed remained uneaten and required manual removal. The 10% treatment showed marginal improvement, with shrimp consuming roughly half the provided feed but exhibiting low activity levels. Tanks receiving 20% and 30% yeast concentrations displayed markedly different responses. Shrimp in these groups moved rapidly toward food introduction points and consumed pellets quickly. Visual activity levels in the higher yeast treatments exceeded those in the control by a substantial margin, with control shrimp growing lethargic as the trial progressed. These results point to spent brewer's yeast as both palatable and potentially necessary for maintaining feeding behavior in shrimp aquaculture systems. The fact that control shrimp rejected standard commercial feed entirely suggests the yeast provides a nutrient or flavor profile absent from conventional formulations. Pompano kept in a nearby tank also found the yeast-supplemented feed palatable, indicating possible applications beyond shrimp production. The cost implications carry real weight: breweries currently treat spent yeast as waste, making it available at no charge to aquaculture operations willing to process and incorporate it.Project Objective
Convert spent brewer's yeast into a nutrient-dense feed supplement through dehydration and pelletization, then evaluate shrimp feeding behavior, palatability, and survival rates across varying yeast concentration levels compared to commercial feed alone.Manufacturing Design Methods
Collected spent yeast was spread in thin layers on silicon trays and dehydrated at 140°F for eight hours. The dried product was ground and stored in airtight containers before being weighed and mixed with commercial shrimp feed at 10%, 20%, and 30% ratios by weight. Mixed feed was processed into uniform pellets and distributed to randomized treatment tanks for comparative feeding trials.Analysis
Shrimp in higher yeast concentration treatments (20% and 30%) demonstrated increased feeding activity and pellet consumption compared to control groups. Control tanks exhibited food rejection behaviors and lethargy, while 10% treatments showed intermediate responses. The consistent preference for yeast-supplemented feed across the trial period suggests both palatability and potential nutritional necessity.Future Works
Extended feeding trials using alternative commercial feed bases would test whether the observed preference patterns hold across different formulations. Increasing yeast ratios beyond 30% may prove feasible given the strong behavioral responses at higher concentrations. Trials incorporating pompano and other species could expand the range of aquaculture systems benefiting from brewery waste diversion. Long-term growth and health metrics would establish whether palatability gains translate to improved production outcomes.Acknowledgement
Intracoastal Brewing Company, Saltwater Cowboy, Felix Gabriel, Abe Stephens, Sam Pringle, Mara Skadden, Ashley Herbkersman, Ethan Rupp, Jayden Zhang, Lauren Magnuson, Eliana Wilson, V MarionConservation of Stress and Immune Gene Families Across Major Aquaculture Fish Species
Team Leader(s)
Julia PearsonTeam Member(s)
Rana Alghorir, Maryam Young, Abby Briggs, Sonia PetersFaculty Advisor
Dr. Ralph TurniganConservation of Stress and Immune Gene Families Across Major Aquaculture Fish Species File Download
Project Summary
This project investigates whether key stress and immune gene families are shared across aquaculture and wild fish species. By analyzing genes such as HSP70, HSP90, SODs, GSTs, and MHC Class I and II, we found that core stress genes are consistent across all species, while immune genes vary but are present in all. These results suggest that many fish may have the genetic capacity to succeed in aquaculture.Project Objective
To determine whether core stress and immune genes are conserved across aquaculture fish species and whether this shared genomic basis supports broader viability for aquaculture.Manufacturing Design Methods
Genomic data from multiple fish species were complied using FishBase and analyzed using R. Gene families related to stress response and immune function were compared across aquaculture and wild species.Analysis
Core stress genes were consistently present across all species, while immune genes showed some variation in copy number but were present in every species. No major differences were found between aquaculture and wild fish in these gene families.Future Works
Conduct controlled experiments to test whether species with similar gene profiles show similar responses to stress by measuring gene expression, survival rates, and physiological indicators.Acknowledgement
We thank our faculty advisor, Dr. Turnigan, and the Department of Ocean Engineering and Marine Sciences at Florida Institute of Technology for their guidance and support.The Invisible Shield: Why Our Stomach Doesn’t Digest Itself
Team Member(s)
Kevon FindleyFaculty Advisor
Dr. Jian DuThe Invisible Shield: Why Our Stomach Doesn’t Digest Itself File Download
Project Summary
The stomach contains highly acidic gastric fluid with a very low pH and a thin mucus lining protects the stomach from self digestion while keeping nearby epithelial cells at a neutral pH. This project builds off of Schreiber and Scheid's hypothesis, which suggests that the mucus layer acts as a barrier and transport medium for hydrogen ions releasing them in the lumen through degradation of mucin by pepsinogen. A mathematical model was developed to describe mucin secretion, degradation and hydrogen ion transport, then a steady state analysis was completed to determine an expected range for the thickness of the mucus layer. The results achieved show that the tested model is plausible for maintaining a healthy thickness, and the particular relationship between advection and diffusion in regulating the thickness of the mucus layer.Project Objective
The objective of this project was to develop and analyze a mathematical model which can determine how the protective mucus barrier can be maintained and be of stable thickness while in the presence of such harsh conditions.Analysis
The one dimensional model is based on two differential equations describing mucin variation and hydrogen ion movement. Based on the hypothesis a balance should be struck between degradation and secretion of mucin, so a steady state analysis was performed to focus on the thickness of the mucus layer over time. Assumptions were made that the pepsinogen activates instantaneously at the interface between the lumen and mucus layer leading to the degradation of the mucin. Solving this differential equation can show the hydrogen ion profile and the thickness as a function of the activation threshold of pepsinogen.Future Works
Further work for this model involves refining the activation function at which pepsinogen activates and to move away from an instantaneous model to a continuous rate model.LMCO/Navy Air Pallet for Materials Handling
Team Leader(s)
Samantha Ryan, Ryan ZernekeTeam Member(s)
Joshua Bible, Justin Conner, Brycen Haner, Nevan Juteram, Alexander Lacy, Gavin Lanka, Henry Lewis, Samantha Ryan, Ryan ZernekeFaculty Advisor
Dr. Anand NellippallilSecondary Faculty Advisor
Junot DamenLMCO/Navy Air Pallet for Materials Handling File Download
{kind=link}
Project Summary
An Air Bearing System is a load-bearing material transport system used by customers Lockheed Martin Corporation (LMCO) and the United States Navy. These systems help move large equipment and sensitive items around their facilities. The Air Bearing System is a non-contact, frictionless bearing system that uses a thin layer of pressurized air forced through small holes or porous material to create an air cushion between the ground and the moving device. The Air Pallet is a subsystem of the Air Bearing System and is responsible for lifting the load. Technical challenges of this problem include ensuring no magnetic or electronic components are present in the final design, ensuring the air casters generate no more than 0.5” of vertical lift, and maintaining a level system in operation. This is a reduced scale projected from customer use to student use. The air casters in this system design are scalable to meet a larger scale or smaller scale, if necessary, as they are a soft goods manufactured item. This student design aims to address the current system issues of structural rigidity and maintenance hazards by using a 'drop-in' air caster design to allow maintenance to be performed without accessing the underside of the Air Pallet. In this student design the drive tractor and air pallet are separate entities which differs from the current competition, Hovair and AeroGo. A combined budget of $10,000 was allocated for both projects and split evenly giving both teams $5,000. From this budget, the team has spent $4,001.48 on all materials and tooling necessary to manufacture the Air Pallet, leaving a balance of $998.52.Project Objective
There is a need to develop an Air Bearing System that will provide smooth, level, omnidirectional movement of a significant Load for facility operations. The current system has experienced issues with structural rigidity and requires complex maintenance operations using hazardous solvents, adhesives, and coatings. Additionally, it is aged and due for a design refresh focusing on efficient use of space, manpower, and time. The goal is to minimize these factors and improve environment and economic efficiency, while ensuring the safety and precision of the Load operations. The resulting product will benefit an internationally-collaborative global defense program.Manufacturing Design Methods
The frame of the Air Pallet is made of 304 stainless steel, 2-in X 2-in square tubing of 1/16-in thickness purchased from Grainger. The air casters are made of 304 stainless steel sheets of 3/16-in thickness purchased as a replacement from OnlineMetals. The load design is a generic steel weight tree.Specification
The Air Pallet is compliant with MIL-STD-1472H (design criteria fro human engineering) by featuring provisions for manual handling with the air supply shut off and in an unloaded state. All non-electronic controls are visible to the operator from the operator position, as well as the spotter from the spotter position.Analysis
FEA was performed on the loading surface of the Air Pallet to determine if the material chosen could withstand the loading requirement. Analysis was performed on both the full system model and a 1/4 system model to determine a Factor of Safety of 3.71.Acknowledgement
The Air Pallet team would like to extend gratitude to our customer advisors Lauren Bowers and Anderson Crookshanks from Lockheed Martin and to Armstron Ekpete of the U.S. Navy.Studies of a Mitigation Strategy for Carrington class superflares
Team Leader(s)
José FuentesTeam Member(s)
José Fuentes, Camilla WrightFaculty Advisor
Manasvi LingamSecondary Faculty Advisor
Juan Carlos PalaciosStudies of a Mitigation Strategy for Carrington class superflares File Download
Project Summary
On September 1, 1859, a powerful solar flare was observed by Richard Carrington [1]. This flare ejected highly energetic plasma, called a coronal mass ejection (CME), towards Earth. This CME impacted Earth, causing magnetic induction which seriously impacted technology. Lingam and Loeb (2017) [2] predicted that if the Carrington CME were to occur today, the economic damages to the US would be on the order of $2 trillion USD. In this work, we present an impact mitigation strategy as a sufficiently strong magnetic dipole field placed at a gravitational equilibrium point (L1) located at 1.5 Gm from Earth in the direction towards the sun [2]Exploring The Viability Of PGPBs In Martian Regolith Agriculture
Team Member(s)
Nathan KawalskiFaculty Advisor
Dr. PalmerExploring The Viability Of PGPBs In Martian Regolith Agriculture File Download