/prod01/fit-cdn-pxl/media/header-images/showcase-header.jpg)
Awards 2024
President's Cup
StrabiSense

Team Leader(s)
Karly LiebendorferTeam Member(s)
Ingrid Cooper, Michael Ninomiya, Seda YilmazFaculty Advisor
Dr. Linxia GuStrabiSense File Download
Project Summary
Amblyopia, commonly known as lazy eye, affects approximately 4% of the U.S. population, translating to around 10 million individuals. This condition can develop over an individual's lifetime or may be present from birth, particularly in premature birth. Amblyopia is characterized by an imbalance in the muscle tension of the eyes, leading to misalignment and improper coordination between the two eyes. Traditional treatment involves strabismus surgery, which aims to correct this misalignment by adjusting the tension in the eye's muscles. While strabismus surgery primarily focuses on the misaligned eye, achieving symmetrical alignment and coordination between both eyes is the ultimate objective. However, adjustments to the misaligned eye muscles can sometimes inadvertently impact the unaffected eye. This interaction may lead to complications, including impaired vision in both eyes. To address these challenges, our team developed a force sensor, StrabiSense, explicitly designed for strabismus surgery. This innovative device will provide surgeons with real-time, quantifiable data on the force exerted by the extraocular muscles during the surgical procedure.Project Objective
Our project aims to significantly advance the field of strabismus surgery by integrating a force sensor named StrabiSense into the standard surgical protocol. The primary objective is to provide surgeons with quantitative data to enhance the precision and effectiveness of surgical procedures. The StrabiSense is designed to measure the force exerted on the extraocular muscles during strabismus surgery and provide a quantitative assessment of muscle tension and deformation, enabling surgeons to make more informed decisions during eye muscle adjustment.Manufacturing Design Methods
Our team redesigned the traditional strabismus surgery hook, introducing a compact, precision-enhanced device. This advanced tool features a shortened hook secured by a drill screw headpiece for optimal stability during procedures. A state-of-the-art strain gauge integrated beneath the hook mechanism is central to our design. This gauge accurately measures the force exerted on the eye muscle, transforming mechanical deformation into reliable data. As the hook engages the muscle, the device calculates the force applied. This information is displayed on an LED screen, guiding surgeons to tighten or loosen the muscle for optimal surgical outcomes. Our device represents a leap forward in surgical precision, offering real-time feedback that enhances patient safety and procedure efficacy. Our device is embedded with the Arduino Nano 33 BLE Sense, a module with a wireless connectivity feature. This enables integration with external devices, including computers and, shortly, a dedicated smartphone app. Our device facilitates real-time data transmission through this wireless capability, ensuring critical surgical information is always at the surgeon's fingertips.Specification
Our surgical tool incorporates a modified strabismus surgery hook attached to a drill screw head bit. This component is precisely engineered to interact dynamically with our force sensor, facilitating the accurate force data exerted by the extraocular muscles during surgery. The force data is immediately transmitted to an Arduino Nano Sense BLE 33 microcontroller upon collection. The results of the data analysis are displayed via an LCD screen, which indicates the force levels through a color-coded system. A slide switch is incorporated into the design for power control, allowing surgeons to turn the device on or off as needed. The device includes a charging port on its base for enhanced convenience and usability in surgical environments.Analysis
Our novel strabismus force sensor offers a groundbreaking approach to revolutionizing strabismus surgery. StrabiSense will streamline and standardize strabismus surgery by redefining the surgical landscape, ensuring accuracy and consistent results. The device is affordable without compromising quality or functionality. Our device is convenient, has wireless capabilities, and is portable since it does not require constant electrical outlet access, enhancing ease of use. Our sensor removes the guesswork from strabismus surgeries for training purposes, providing a reliable education and skill development tool. Our tool will allow strabismus surgeons to enhance surgical precision and a standardized procedure.Future Works
Future improvements will emphasize refining the product's design to ensure it is more streamlined and visually appealing. The focus will be optimizing the device for ease of handling while integrating ergonomic principles to enhance user comfort and operational efficiency. Plans to develop an app designed explicitly for surgeon interaction. This advanced tool will facilitate real-time data exchange and decision-making support, enhancing surgical procedures' precision and effectiveness. Recognizing the paramount importance of sterilization in medical environments, our future models will incorporate state-of-the-art autoclavability features. Making the device smaller to cater to diverse medical scenarios. This development will further improve the ease of handling by medical professionals. It will also expand the device's applicability to a broader range of surgical environments and patient anatomies.Acknowledgement
Mohammad Ahmed, Dr. Linxia Gu, Dr. Kourosh Shahraki, Dr. Donny Suh, Dr. Jim Brenner, and Maria Fernanda SagastumeNovel Technique using Cherenkov Radiation for Nuclear Terrorism Prevention
Team Leader(s)
Matthew RomanoTeam Member(s)
Matthew RomanoFaculty Advisor
Dr. Marcus HohlmannProject Summary
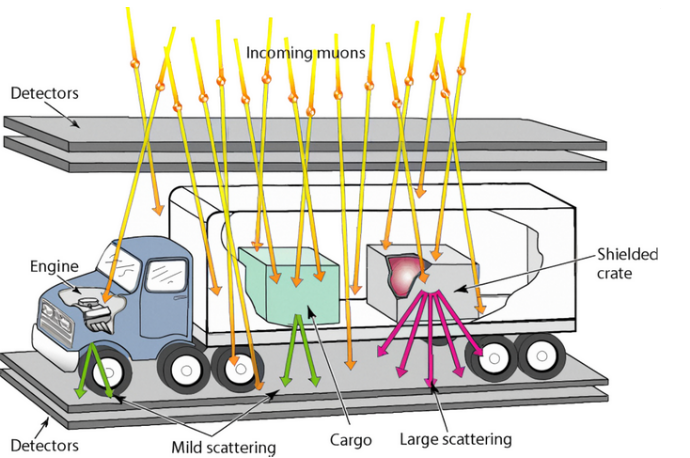
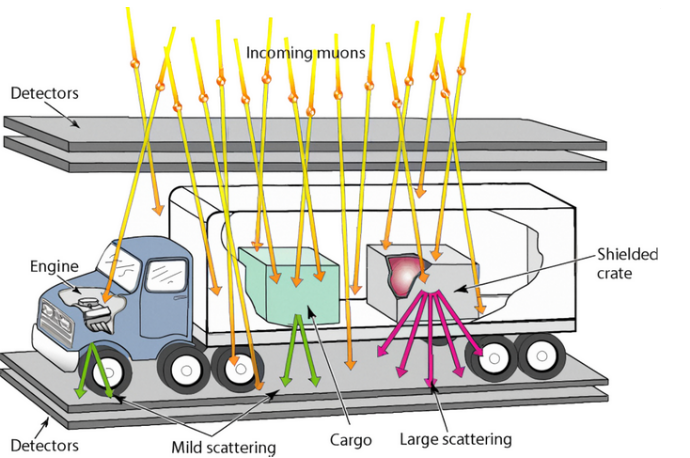
I present a novel approach for detecting rogue nuclear material at country borders, addressing the current lack of reliable and economical mechanisms for this purpose. My proposed methodology utilizes Cherenkov radiation emitted by cosmic muons to reconstruct the particle's trajectory using a single detector. By analyzing the eccentricity of the projected ellipse formed when the Cherenkov cone intersects the detector plane, one can determine the angle a muon makes with the detector. This innovative technique effectively doubles the efficiency of the detection system by halving the number of required detectors while simultaneously increasing the resolution of the measurements taken. To validate the feasibility and accuracy of the proposed method, I conducted Geant4 simulations. The results demonstrated a strong correlation between the true angles of the particles and the reconstructed angles using my new model, with a 96.8% correlation achieved in a sample of 200 simulated events. These findings highlight the potential of this novel technique to significantly improve the detection of dense nuclear matter at borders, thereby enhancing nuclear terrorism prevention efforts. The successful implementation of this methodology could provide a more efficient and accurate means of identifying and intercepting rogue nuclear materials, ultimately strengthening national and international security measures.Project Objective
The objective of this project is to develop a novel technique for detecting rogue nuclear materials at country borders using Cherenkov radiation emitted by cosmic muons. By utilizing a single detector to reconstruct the muon's trajectory, this method aims to improve the efficiency and accuracy of nuclear material detection, ultimately enhancing global security and preventing nuclear terrorism.Future Works
In future works, I plan to further refine and optimize the proposed methodology by conducting more extensive simulations and developing a prototype detector system for real-world experiments. Collaborations with border security agencies and nuclear physics experts will be crucial in identifying potential challenges and ensuring the successful implementation of this novel approach in real-world scenarios.Northrop Grumman Best in Show Awards
BiProp – Liquid Rocket Competition Team
Team Leader(s)
Project Manager: Sherie LaPrade, Systems Engineer: Matt HouseTeam Member(s)
Mohammed Aldosari, Michael Cowles, Nate DeForest, Matthew DiLella, Rodrigo Graca, Matt House, Sherie LaPrade, Alejandro Perez, Niyati Shah, Shelton Waddell, Trevor Warnke, Andree Wilson, Matt WisdomFaculty Advisor
Felix GabrielSecondary Faculty Advisor
Dr. Michael HarrisBiProp – Liquid Rocket Competition Team File Download
{kind=link}
Project Summary
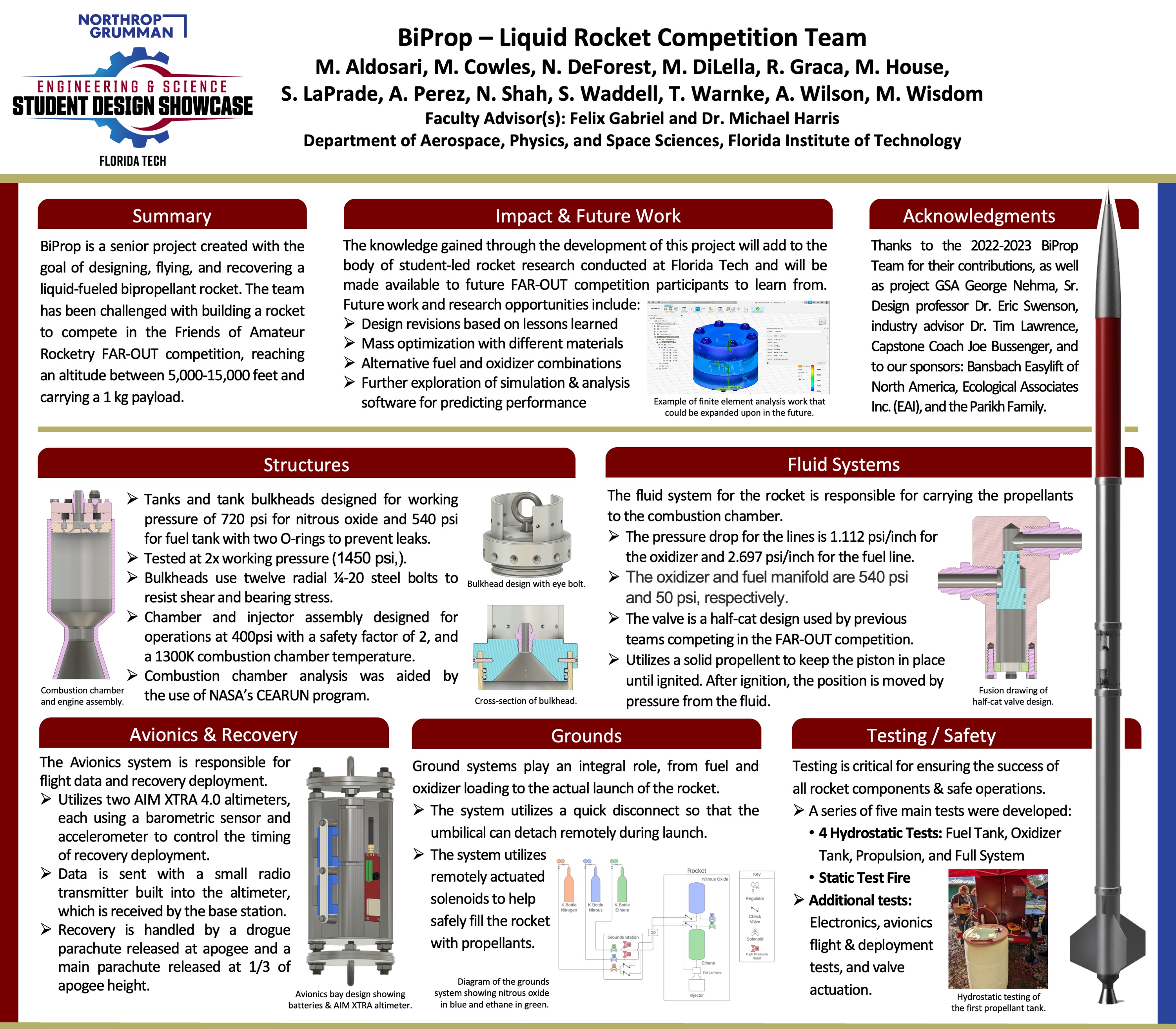
Due to their prevalence in the modern market, it is essential that students develop a strong understanding of the principles and practice of liquid bipropellant rocket design. This project was conceived as an effort to provide that practical experience and to improve upon previous attempts at developing a liquid bipropellant rocket at the Florida Institute of Technology. Should the design prove successful, it will be the first rocket of its kind to be designed, tested, launched, and recovered in the school’s history. The BiProp team is designing their liquid bipropellant rocket to compete in the FAR-OUT Competition on June 5-11, 2024, in the Mojave Desert. This Senior Capstone project builds off lessons learned from the 2022-2023 capstone project. The team is challenged with launching and recovering a liquid bipropellant rocket that must reach an altitude band of 5,000ft to 15,000ft and carry a payload above 1kg. This will be achieved by building a propulsion system that uses a propellant combination of Nitrous Oxide and Ethane, which provides a thrust-to-weight of 10:1 and a burn time of around 2 seconds. To accomplish this, the team has been divided into four technical subsystems: Grounds, Structures, Budget/Safety, and Avionics/Recovery. The team aims to complete a variety of tests before mid-May 2024: hydrostatic pressure tests of both tanks, an avionics test, and a static test fire. These tests are designed to validate the design, manufacturing, and construction of the final product to allow for revisions as necessary before the competition.Manufacturing Design Methods
Many components and subsystems are being built in-house using the L3Harris Student Design Center (HSDC) and machine shop and in consultation with their leadership. Many parts have been machined in person using manual and CNC machinery (i.e.: lathe, mills, welding) in both locations. While official testing and operation of the rocket will be in an acceptable outdoor environment, assembly and installation of the rocket subsystems can be conducted at the reserved bench for the BiProp team in the HSDC.Analysis
The team has used accepted industry methods (hand calculations, simulation tools, custom simulation code, etc.) to compare design approaches and to satisfy the project requirements. Design solutions for the rocket and each subsystem have been chosen based on their safety to personnel and equipment, feasibility, and cost. A full series of tests has been developed and is in progress to ensure the safe operation of the rocket.Future Works
Future work and research opportunities include design revisions based on lessons learned, mass optimization with different materials, alternative fuel and oxidizer combinations, and further exploration of simulation & analysis software for predicting performance.Acknowledgement
The team would like to thank the 2022-2023 BiProp Team for their contributions, as well as Faculty Advisors Felix Gabriel and Dr. Michael Harris, project GSA George Nehma, Sr. Design professor Dr. Eric Swenson, industry advisor Dr. Tim Lawrence, Capstone Coach Joe Bussenger, and to our sponsors: Bansbach Easylift of North America, Ecological Associates Inc. (EAI), and the Parikh Family.
Evaluating Radiation Resistance and Recovery in Anabaena cylindrica
Team Leader(s)
Indigo BoggsTeam Member(s)
Indigo BoggsFaculty Advisor
Dr. Andrew PalmerProject Summary
Radiation protection is a crucial consideration in space exploration and settlement. Among the various types is ultraviolet radiation (UVR) which can have significantly deleterious effects on biological organisms. Prior to the formation of the ozone layer, Earth was affected by these rays, along with the different bacterial species that were present significantly impacting the distribution and nature of life across Earth. Members of the phylum Cyanophyta (Cyanobacteria), among the oldest living organisms, evolved to grow under such heavily irradiated conditions. One common strategy among members of this phylum is the production of dense ‘biomats’ which can protect the bacteria from radiation while also providing a nutrient rich environment. Such biomats are crucial to the pioneering role members of this genus play in regenerating ecosystems and could be of significant benefit to space agriculture efforts. We hypothesize that the cyanobacteria Anabaena cylindrica has natural resistance and recovery systems to withstand UV radiation and still form biomats which could be used to support plant growth in regolith-based agriculture. While A. cylindrica resistance to UV-A and B radiation is well documented, less is known about the resistance to UV-C. We hypothesize that following exposure to UV-C, A. cylindrica retains its capacity to produce these biomats in the present study we provide preliminary data on UV-C resistance and recovery via. If A. cylindrica can withstand these UV-C rays, it is a promising species for future space colonies which could use it to fertilize regolith found on different planets.Honors College Award
Seaplane Hydrofoil

Team Leader(s)
Farah Shaaban (PM), Andrew Traficante (SE)Team Member(s)
Rodrigo Alarcon, Alexandra Cleveland, Andrew Cummings, Isaro Gatsinzi, Slate Varn, Kaitlyn WollenzienFaculty Advisor
Dr. Eric SwensonProject Summary
The Seaplane Hydrofoil aims to enhance seaplane performance and safety in challenging environments by integrating hydrofoils within the aircraft's floats. The addition of hydrofoils allows the seaplane to lift off faster and shorten takeoff distances by raising the floats out of the water, reducing drag. A sub-scale prototype was developed to test novel active pitch control and hydrofoil retraction methods. These hydrofoils are designed with passive stability features and are constructed using Tow-Based Discontinuous Composites to minimize weight. The project will validate these enhancements through a rigorous flight test campaign, setting the stage for potential full-scale production using traditional manufacturing techniques.Project Objective
OBJ-01. The team shall design, build, and test a hydrofoil attachment for a seaplane. OBJ-02. The team shall design a hydrofoil that interfaces with any floatplanes. OBJ-03. The team shall design a hydrofoil that decreases takeoff distance. OBJ-04. The team shall design a hydrofoil that improves rough-water performance by decreasing the airspeed loss per swell. OBJ-05. The team shall test the hydrofoil-equipped model plane. OBJ-06. The team shall deliver flight test performance data to prove the device's functionality.Manufacturing Design Methods
Carbon Fiber FDM 3D printing, PLA 3D printing, Tow-Based Discontinuous Composites utilizing 1-inch carbon fiber tows, Autodesk Fusion 360, Ansys Fluent.Specification
NACA 4412, 2 in chord, 3 in span, 8 deg AoA, located at CG with 30 deg cant angle.Analysis
The team utilized Computational fluid dynamics (CFD) to analyze the pressure and velocity distribution around the hydrofoil and the stress/strain induced. This enabled cavitation and flutter analysis before the final structural design to ensure the hydrofoil and its rod would not suffer plastic deformation. An extensive CAD was created in Fusion 360 to model the seaplane hydrofoil prototype and its housing. This allowed the manufacturing team to make molds for the hydrofoils. The control systems were analyzed to verify proper flapevon (flap + elevator + aileron) mixer outputs and retraction. The structural integrity of the hydrofoil was analyzed by performing a three-point bending flexure test on different samples. The aircraft was configured in three ways and tested in a water strip to determine takeoff distance. A drone hovered above the test aircraft and recorded video footage. The video footage was analyzed to measure takeoff distance.Future Works
We will explore the possibility of incorporating new technologies and materials to further enhance the hydrofoil’s housing within the floats. Furthermore, we intend to increase the capabilities of the hydrofoil to allow active pitch stabilization through an autopilot control system. Scalability feasibility has been analyzed in the team's scaling report. The RC plane poses unique challenges because ancillary actuators add significant weight relative to the aircraft's gross weight. On a larger seaplane, this would be a small fraction. Furthermore, manufacturing on a small scale requires novel techniques, as evidenced by the team's approach with tow-based discontinuous composites. The team would like to make a full-scale model in the future to analyze these concerns. The full-scale analysis would involve materials research, vibration and flutter analysis, and advanced foil shapes designed for turbulent and super cavitating conditions induced by cavitation.Acknowledgement
We want to give special thanks to our graduate student assistant, Ethan Bair, our analyst, Quentin Paladino, and our mentor, Austin Brittingham.On the probability of life per site
Team Member(s)
Ruth NicholsFaculty Advisor
Manasvi LingamOn the probability of life per site File Download
Project Summary
Earth is unique for being the only planet known to be currently habitable, making it essential for study when it comes to searching for life elsewhere in the universe. In the new and growing field of astrobiology, many unknowns and uncertainties remain with regards to the emergence of life on Earth. Urability, in contrast to habitability, describes the ability of a world to host abiogeneiss, the process through which organisms arise from non-biological materials. Various habitats found on Earth have been suggested as potential urable sites, including but not limited to deep sea hydrothermal vents, semiarid intermountain valleys, atmospheric aerosols, lakes and ponds, beaches and lagoons, nuclear geysers, impact craters, and hydrogels. These sites have been identified as providing the basic criteria assumed to be required by life as we know it. These criteria, although still undefined and contestable, tend to include the following: a solvent (liquid water) and sources of free energy and organic compounds as well as mechanisms for concentration and for amplifying reactions. Here, we are concerned with estimating the number of abiogenesis events on a given world despite the limited information available (the only instance being that of the emergence of life at least once on Earth) by generating the Probability Distribution Function (PDF) and, subsequently, the Cumulative Distribution Function (CDF) of the probability of a given site i hosting a successful abiogenesis event, which is denoted here as p_L. By looking at three extreme scenarios (the optimistic, pessimistic, and agnostic cases, with p_L ~ 1, p_L ~ 0, and the “uninformative” log-uniform prior, respectively) for the abundance of abiogensis, insight can be gained into the potential PDFs for different values of p_L.A new memory process: Context familiarity dissociates from item familiarity
Team Leader(s)
Jahdiel Perez CabanTeam Member(s)
Jahdiel Perez Caban, Evan Clise, Sarah Smith, Kiera Rivera, Jesse Bengson, Daniel Drane, Randal Waechter, Arel Marsh, & Richard J. AddanteFaculty Advisor
Richard J. AddanteA new memory process: Context familiarity dissociates from item familiarity File Download
Project Summary
Episodic memory is accounted for with two processes: ‘familiarity’ when generally recognizing an item and ‘recollection’ when retrieving the full contextual details bound with the item. Paradoxically, people sometimes report contextual information as familiar but without recollecting details, which is not easily accounted for by existing theories. We tested a combination of item recognition confidence and source memory, focusing upon ‘item-only hits with source unknown’ (‘item familiarity’), ‘low-confidence hits with correct source memory’(‘context familiarity’), and ‘high-confidence hits with correct source memory’ (‘recollection’). Results across multiple within-subjects (trial-wise) and between subjects (individual variability) levels indicated these were behaviorally and physiologically distinct. Behaviorally, a crossover interaction was evident in response times, with context familiarity being slower than each condition during item recognition, but faster during source memory. Electrophysiologically, a Condition x Time x Location triple dissociation was evident in event-related potentials (ERPs), which was then independently replicated. Context familiarity exhibited an independent negative central effect from 800-1200 ms, differentiated from positive ERPs for item-familiarity (400 to 600 ms) and recollection (600 to 900 ms).These three conditions thus reflect mutually exclusive, fundamentally different processes of episodic memory. Context familiarity is a third distinct process of episodic memory.Project Objective
The focus of the present investigation was to assess if the ERP effects for context familiarity can be reliably dissociated from those for item familiarity, and to add novel insights from behavioral measures of response times.Acknowledgement
This work was supported by NIH Grant 1 L30 NS112849-01 & 2 L30 NS112849-02 to RJA from NINDS, an IDC Grants to RJA from the FIT College of Psychology and Liberal Arts, and generous direct funds from the Florida Tech Office of the Provost, Dr. Marco Carvalho.Best in Show Awards
Seaplane Hydrofoil

Team Leader(s)
Farah Shaaban (PM), Andrew Traficante (SE)Team Member(s)
Rodrigo Alarcon, Alexandra Cleveland, Andrew Cummings, Isaro Gatsinzi, Slate Varn, Kaitlyn WollenzienFaculty Advisor
Dr. Eric SwensonProject Summary
The Seaplane Hydrofoil aims to enhance seaplane performance and safety in challenging environments by integrating hydrofoils within the aircraft's floats. The addition of hydrofoils allows the seaplane to lift off faster and shorten takeoff distances by raising the floats out of the water, reducing drag. A sub-scale prototype was developed to test novel active pitch control and hydrofoil retraction methods. These hydrofoils are designed with passive stability features and are constructed using Tow-Based Discontinuous Composites to minimize weight. The project will validate these enhancements through a rigorous flight test campaign, setting the stage for potential full-scale production using traditional manufacturing techniques.Project Objective
OBJ-01. The team shall design, build, and test a hydrofoil attachment for a seaplane. OBJ-02. The team shall design a hydrofoil that interfaces with any floatplanes. OBJ-03. The team shall design a hydrofoil that decreases takeoff distance. OBJ-04. The team shall design a hydrofoil that improves rough-water performance by decreasing the airspeed loss per swell. OBJ-05. The team shall test the hydrofoil-equipped model plane. OBJ-06. The team shall deliver flight test performance data to prove the device's functionality.Manufacturing Design Methods
Carbon Fiber FDM 3D printing, PLA 3D printing, Tow-Based Discontinuous Composites utilizing 1-inch carbon fiber tows, Autodesk Fusion 360, Ansys Fluent.Specification
NACA 4412, 2 in chord, 3 in span, 8 deg AoA, located at CG with 30 deg cant angle.Analysis
The team utilized Computational fluid dynamics (CFD) to analyze the pressure and velocity distribution around the hydrofoil and the stress/strain induced. This enabled cavitation and flutter analysis before the final structural design to ensure the hydrofoil and its rod would not suffer plastic deformation. An extensive CAD was created in Fusion 360 to model the seaplane hydrofoil prototype and its housing. This allowed the manufacturing team to make molds for the hydrofoils. The control systems were analyzed to verify proper flapevon (flap + elevator + aileron) mixer outputs and retraction. The structural integrity of the hydrofoil was analyzed by performing a three-point bending flexure test on different samples. The aircraft was configured in three ways and tested in a water strip to determine takeoff distance. A drone hovered above the test aircraft and recorded video footage. The video footage was analyzed to measure takeoff distance.Future Works
We will explore the possibility of incorporating new technologies and materials to further enhance the hydrofoil’s housing within the floats. Furthermore, we intend to increase the capabilities of the hydrofoil to allow active pitch stabilization through an autopilot control system. Scalability feasibility has been analyzed in the team's scaling report. The RC plane poses unique challenges because ancillary actuators add significant weight relative to the aircraft's gross weight. On a larger seaplane, this would be a small fraction. Furthermore, manufacturing on a small scale requires novel techniques, as evidenced by the team's approach with tow-based discontinuous composites. The team would like to make a full-scale model in the future to analyze these concerns. The full-scale analysis would involve materials research, vibration and flutter analysis, and advanced foil shapes designed for turbulent and super cavitating conditions induced by cavitation.Acknowledgement
We want to give special thanks to our graduate student assistant, Ethan Bair, our analyst, Quentin Paladino, and our mentor, Austin Brittingham.Innovative 4D Printing: Engineering Anisotropic Collagen-TCP Scaffolds for Bone Regeneration
Team Leader(s)
Karly LiebendorferTeam Member(s)
Karly LiebendorferFaculty Advisor
Vipuil KishoreInnovative 4D Printing: Engineering Anisotropic Collagen-TCP Scaffolds for Bone Regeneration File Download
Project Summary
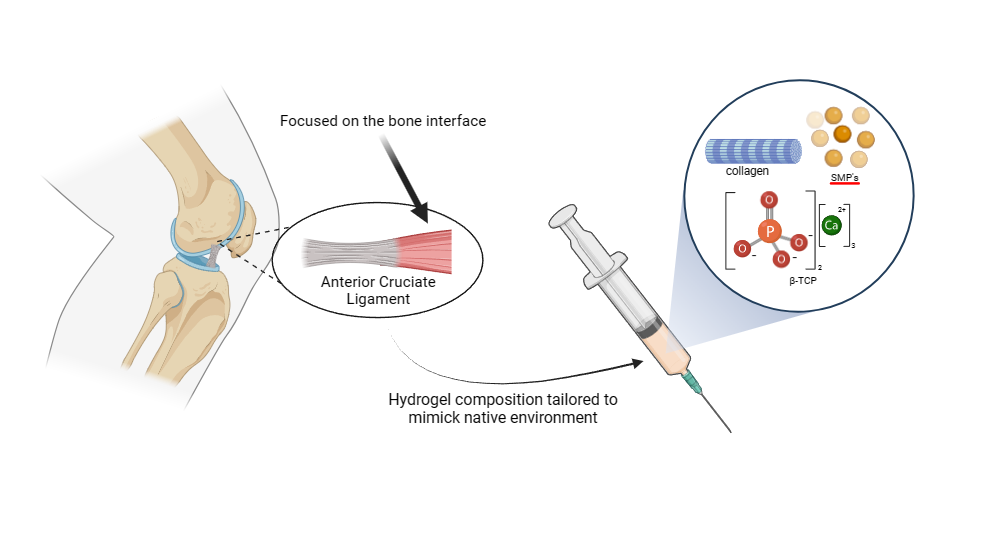
Composite biomimetic scaffolds fabricated by combining collagen with bioceramics show immense promise for bone tissue engineering (BTE) applications. In this realm, applications of extrusion-based 3D printing strategies with collagen-based composite inks yield 3D scaffolds with high precision. While these scaffolds could mimic the 3D complexity of native tissue, the microarchitectural aspects (i.e., collagen anisotropy) are lacking. Recent work in our lab has shown that combining extrusion-based 3D printing with magnetic alignment approaches in a 4D printing scheme triggers a high degree of collagen anisotropy in printed scaffolds. The current work aims to integrate a bioceramic and observe the effect on print fidelity, collagen alignment, and cellular responses.Project Objective
This study aims to assess the impact of β-tricalcium phosphate (β-TCP) incorporation on the rheological properties of collagenous inks as well as on collagen anisotropy and print fidelity of 4D printed scaffolds. Manufacturing Design Methods
The scaffolds were fabricated using methacrylated collagen (Col, 6 mg/ml) and xanthan gum (XG, 10 mg/ml) that were combined in a Col:XG ratio of 4:1, to which a cytocompatible photoinitiator (VA-086, 0.1% w/v), streptavidin-coated magnetic particles (SMP, 0.4 mg/ml), and β-TCP (0%, 10%, 70% w/w) were added. Collagenous constructs were 4D printed in the presence of a 0.2 T magnetic field and incubated for 30 min at 37 °C to induce gelation and crosslinked using UV light.Specification
The print fidelity of the resultant scaffolds was measured using ImageJ by comparing the area of the printed scaffolds to that of the 3D model. Collagen fiber alignment in 4D printed scaffolds was assessed using polarized light microscopy (PLM) and scanning electron microscopy (SEM). AlamarBlue (AB) assay was performed to analyze the effect of collagen alignment on Saos-2 metabolic activity (N = 3/group/timepoint). Quantitative data were analyzed using one-way ANOVA with Tukey posthoc test. Statistical significance was set at pAnalysis
Higher β-TCP concentration led to a disruption in collagen alignment and cell viability. However, print fidelity was not significantly impacted by ceramic incorporation. Lastly, preliminary results demonstrate promise for using 4D printing methods to generate biomimetic scaffolds for BTE applications.Future Works
The effects of β-TCP incorporation on osteogenic cell response are currently under investigation. Studies are currently underway to identify the optimal ink composition that will yield composite scaffolds with retention of collagen anisotropy.Acknowledgement
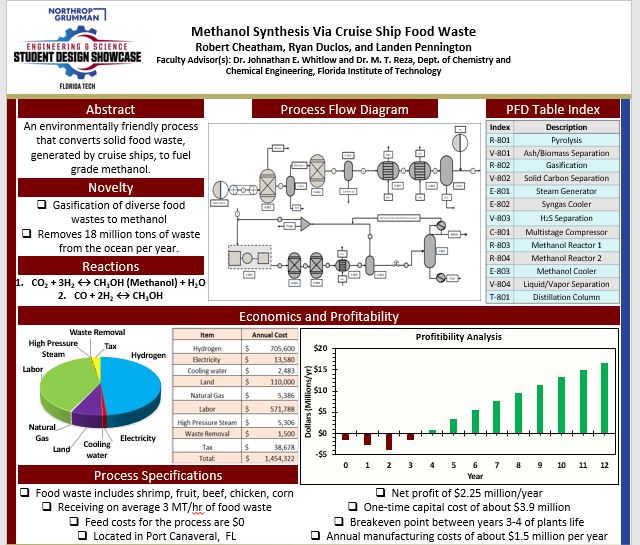
This work was supported by a grant from the National Institute of Health (NIH 2R15AR071102). Special thanks to Nashaita Y. Patrawalla for designing the initial model and experimental parameters.Methanol Synthesis Via Cruise Ship Food Waste
Team Leader(s)
Robert CheathamTeam Member(s)
Ryan Duclos and Landen PenningtonFaculty Advisor
Johnathan E. WhitlowSecondary Faculty Advisor
Dr. M. T. RezaProject Summary
Cruise ships throughout this have always been hailed as a symbol of joy. Bright colors, ringing laughter floating through the air, and delicious smells of food and fresh air are all things we associate with the cruise ship experience but that image is threatened daily. We live in a day and age where the safety of the world is in critical danger, where garbage freely floats on the surface of our oceans and the quantity of our natural fuel resources is depleting at a staggering rate if all this was not enough, that joyous experience of a cruise comes at a price of almost 1 billion tons of food waste being dumped in our oceans each year So what are we going to do? How do we not only prevent waste from polluting our oceans and people from depleting our natural resources, all while doing it in a way that doesn’t further harm the world around us??! While this sounds like quite the undertaking, fortunately, we have an alternative. We propose a process that converts the excess food waste generated by cruise ships and converts it into methanol. This is done in an environmentally friendly way and has several potential applications such as fuel for cruise ships. So for our design, we decided to make a plant located in the largest cruise ship port in the world, port Canaveral, and our plant has a design that comfortably handles 5 cruise ships' worth of waste per day(Click), with a 10% overdesign for growth. By implementing our process, we remove 18 million gallons of waste, and not only do we remove that waste, but we turn it into something that can help fuel our future.Project Objective
By taking solid food waste from cruise ships, our process hopes to remove 18 million gallons of food waste from our oceans per year while turning that waste removal into profitable methanol.Manufacturing Design Methods
Our design incorporates a basic multi-step process of taking solid food waste and converting it first into syngas, and then to fuel-grade methanol before purifying it into pure methanol.Housing For Heroes
Team Leader(s)
Shane Colburn, Travis RembrandtTeam Member(s)
Shane Colburn, Matthew Riley, Conner Delanoy, Domantas Marocka, Hunter Viera, Travis Rembrandt, Andrea TovarFaculty Advisor
Dr,. Troy NguyenSecondary Faculty Advisor
Dr. Albert BleakleyHousing For Heroes File Download
Project Summary
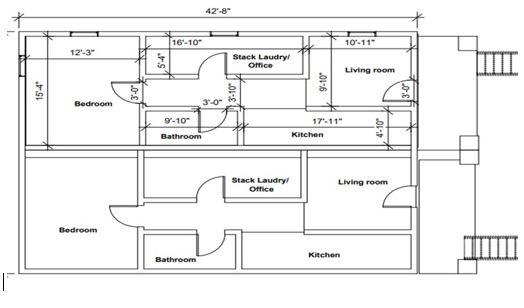
Our Housing for Heroes project originates from the vision of Mr. John Newton, a longstanding advocate for creating affordable housing for military veterans. The commitment to this idea has spanned several years and this is why he approached Dr. Troy Nguyen at Florida Tech seeking to bring this vision to fruition through the Senior Design Showcase and Dr. Nguyen's tutelage. Florida Tech’s curriculum and quality of education are held in high regard, so the upcoming generation of Construction Management and Civil Engineering was chosen to bring this vision to the next phase of becoming a reality. The sixty-eight-unit development, situated on Wickham Road, just northwest of the Pineda Causeway intersection, will consist of seventeen two-story quadplexes with one-bedroom/one-bathroom 750 square-foot units.Project Objective
CPEG is dedicated to providing provide affordable, quality housing for military veterans through our Housing for Heroes project. Our mission is to create a residential community for military veterans in Melbourne, FL, with units priced affordably below $120,000, serving as a national model of support and excellence.Manufacturing Design Methods
Monolithic slab and SIP to ensure the construction time and cost is reduced. The earthwork moved to excavate the ponds will be tested, and if usable, will be used for filling material.Specification
Muck must be removed, and fill material that meets specific properties will be able to achieve 90% modified proctor testing. SIP connections to foundations and other joints and joists. Hurricane straps and nailing patterns must be met to ensure proper design strength. ADA parking and housing were also a focus point; making half of our development ADA compliant housing was a great achievement. Water detention and retention ponds are found on the north and south of the property to handle the newly developed impervious areas.Analysis
Soil testing, SIP automation, cost of construction, and value to housing for veterans.Future Works
Any changes or repairs to the utilities under the slab will be costly. The need to construct connections is critical. SIP construction will make the building durable and reliable for natural disasters, most future work would consist of maintenance. Additionally, adding units to continuing support for struggling veterans.Acknowledgement
With the housing market on an exponential climb with no stop in sight, the veterans that are displaced are struggling to afford a reasonable home. Using the ideas of efficient and cheaper means of construction without jeopardizing the structural integrity of the structures. The development supports this with only having the construction cost for one unit around 60,000. We support wounded veterans with our ADA housing which makes up 50% of the development. Please fill out your sections on this word document and I will copy and paste to the form.
COBOT
.jpg)
Team Leader(s)
Zach ChampionTeam Member(s)
Zach Champion, Logan Boehm, Matthew McGuckian, Saad Aloraymah, Josh Rodriguez, Meshari Almutairi, Liam Progulske, Zixin Zhou, Qingying HuFaculty Advisor
Lee CarawayCOBOT File Download
Project Summary
This project aims to develop a system that allows a collaborative robot (COBOT) to play chess with humans seamlessly and safely. The system integrates various components, including the COBOT (a modified AR3 robot arm from Annin Robotics), the Robot Operating System (ROS2), computer vision (using an Xbox Kinect and integrated ArduCam depth cameras), a custom chess clock, and a web-based dashboard. The COBOT is designed to interact with humans during a game of chess while considering human factors to ensure predictable and safe behavior.Project Objective
The primary objective of this project is to demonstrate how a robotic system can be designed with human factors in mind, enabling seamless and safe interaction between humans and robots. By integrating various technologies, such as computer vision, familiar interfaces (e.g. a chess clock), and motion planning, the project aims to create a robotic system that can play chess with humans while adhering to established rules and conventions.Manufacturing Design Methods
We designed and 3D printed numerous components, including: - A custom 3-fingered gripper that houses a depth camera and uses helical gears to move the fingers using a central servo motor. - A chess clock that communicates with the computer over serial. - Mounts and enclosures for magnetic rotary encoders.Future Works
We identify two main areas for future work: Hardware Issues: Backlash in the robot's joints makes precise motion difficult. While workarounds were implemented, a hardware fix is necessary to achieve true consistency. Second COBOT: The project originally planned for two COBOTs to play against each other, but the second COBOT had to be cannibalized to fix issues with the main one. Rebuilding the second COBOT is necessary to enable COBOT-vs-COBOT games.Acknowledgement
Chris Annin and Annin Robotics for the design of the open-source AR3 arm.jpg)
Robotic Mining Capstone (RMC)
Team Leader(s)
Sidney Causey (PM), Shayla Peak (SE)Team Member(s)
Sidney Causey, Shayla Peak, Mohammed Aljameeli, Junot Damen, Izaya Farrar, Eric Moseley, Michael Muller, Liam Sapper, Chelsea Sweeney, Shelsy Toppenberg, Noah WaltersFaculty Advisor
Dr. Chiradeep SenRobotic Mining Capstone (RMC) File Download
Project Summary
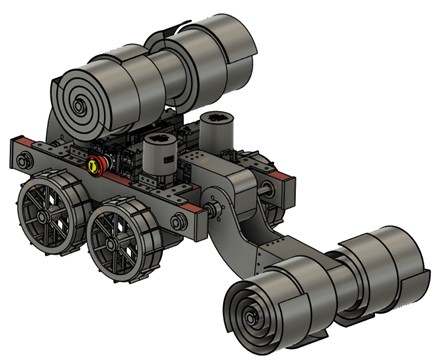
Robotic Mining Capstone (RMC) is a university project in which students must engineer a lunar robot capable of driving, excavating, and constructing a berm designed to shield from radiation, blasts, ejecta, and the harsh space environment. The development of autonomous regolith-handling robots is fundamental for a long-term sustainable human presence on the lunar surface in conjunction with NASA’s Artemis Program. Additionally, the robot’s ability to build berms will protect structures such as astronaut habitats, cryogenic propellant tank farms, and in-situ supplemental food crop centers like NASA’s Veggie Project. RMC’s robot is designed to maximize berm volume relative to size while employing an efficient regolith storage mechanism. Fly ash was used in analog excavation testing to represent the mechanical behavior of lunar maria regolith. To ensure the completion of the robot, engineering design was divided into three subsystems: excavation, structures, and controls.Project Objective
The principal objective of RMC is to design and manufacture a lunar robot capable of excavating, storing, transporting, and depositing surface-level regolith to build a berm that shall shield critical structures from the harsh space environment. Protecting astronaut infrastructure is essential in developing a sustained off-planet human presence.Manufacturing Design Methods
After conducting a thorough literature review of robotic excavation mechanisms, the team opted for a bucket drum design due to its proven success and relative simplicity. The fidelity of this design was validated through Becker 3D® simulations, a software demonstrating regolith particle loading, which yielded the prototype’s fill capacity. The selected bucket drum design was coined “double-double” for its double-scoop double-storage geometry. For mobility, hollow rigid wheels with grousers were selected to improve traction while minimizing dust buildup. The robot’s wheels were 3D-printed in-house from PLA. Through Ansys® simulations, it was proven that PLA can handle expected torques during digging and driving with a factor of safety of 1.23. The chassis is built from Al 6063, selected for its lightweight and machinability. Passive dust control measures were taken to protect sensitive components during driving and excavating. These include implementing 3D-printed dust covers and plugging exposed holes with putty. For the controls suite, a Raspberry Pi is utilized for the onboard computer with Python scripting that executes manual and autonomous waypoint navigation sequences. Brushless motors were implemented for their efficiency and longer lifespan. Additional electrical hardware includes a 12V 9Ah lead acid battery, motor controllers, through bore encoders with hall sensors, an IMU, and a COTS kill switch. All electronics are housed within a sealed box to mitigate dust erosion of wiring and sensitive components.Analysis
A suite of programs was used to perform a comprehensive analysis of the robot. Torque profiling and stress analysis were conducted using Ansys® for the wheels. The anticipated bending stress on the chassis was determined using a MATLAB® shear-moment script. Webots® was used to create a simulated mission arena with rocks, craters, and mining zones. A mock robot was piloted through this virtual arena to refine the capabilities of the physical prototype. To refine the excavation design, Becker 3D® simulated the regolith particle loading into and out of each bucket drum. This yielded a percent fill capacity (~80% per drum). In addition to the aforementioned programs, first-order calculations were performed by hand and in Python to confirm expected magnitudes.Future Works
Future work includes refining the robot’s autonomous navigation code and implementing an image path planning algorithm. While the robot is capable of manual control, full autonomy will require additional testing for turn precision, waypoint accuracy, and calibration of the IMU to mitigate sensor drift and system noise. For lunar-based applications, the team envisions the installation of onboard image processing by which the robot can navigate through a local region without dropping waypoints beforehand.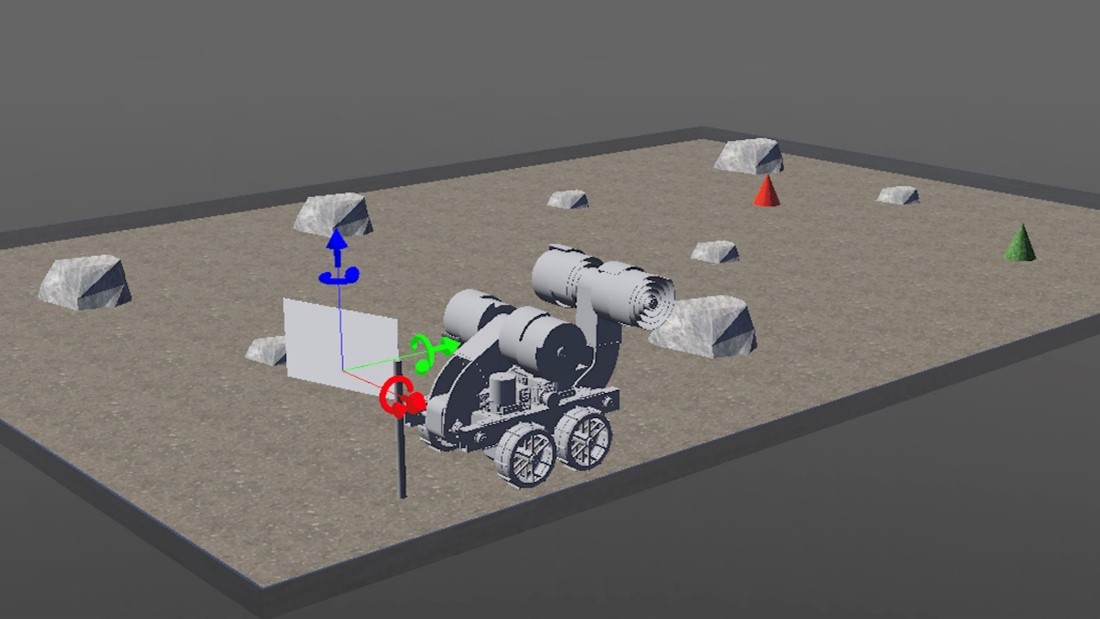
EVE (Environmental Variable Evaluator)
Team Member(s)
Claire Doherty, Lily Manrodt, Jolie ElliottFaculty Advisor
Dr. Stephen WoodEVE (Environmental Variable Evaluator) File Download
.png){kind=link}
Project Summary
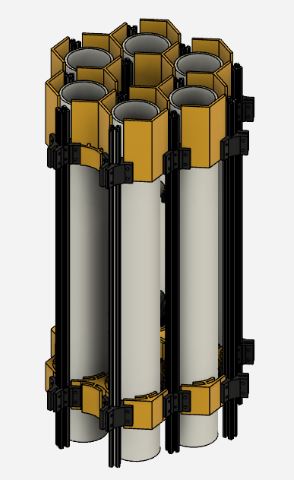
There is a distinct lack of data observing the interface between the ocean and atmosphere during hurricanes and other severe weather systems. Hurricane models and predictions are incredibly important to improve the decisions of those in charge of making safety recommendations. This helps to improve people’s safety and also helps to prevent unnecessary evacuations. Furthermore, this will allow people to better protect property and other assets. This problem led a previous senior design team to create the Launchsonde. The Launchsonde, built as part of Project EVE, is a rocket containing an original electronics package intended to be deployed from a modular core to collect environmental data. The next step to further this project, done by the 2023 senior design team, was to build the modular HIVE (Hurricane Investigation Vital Electronics), which is capable of communicating with the Launchsondes and storing the transmitted data. The mechanical and electrical designs of the HIVE were started in September 2022, and the prototype was completed in July 2023. Mechanically, a design has been chosen for the HIVE that features 3D-printed brackets and extruded aluminum rods securing six PVC pipes that hold the Launchsondes. There is also a central, watertight acrylic housing to hold the electronics. Programming to interface the electronics together in the HIVE was worked on, on top of programming to interface the three components of EVE together: the HIVE, ground station, and Launchsondes. For the first revision of the prototype, electronically, an original electronics package was created, which was breadboarded and tested with the programming.
TEC-V
Team Leader(s)
Michael DowlingTeam Member(s)
Michael Dowling, Zealand Brennan, Stephen Coster, Gabor Papp, Henry HillFaculty Advisor
Dr. Marius Silaghi, Dept. of Electrical Engineering and Computer Science, Florida Institute of TechnologyTEC-V File Download
Project Summary
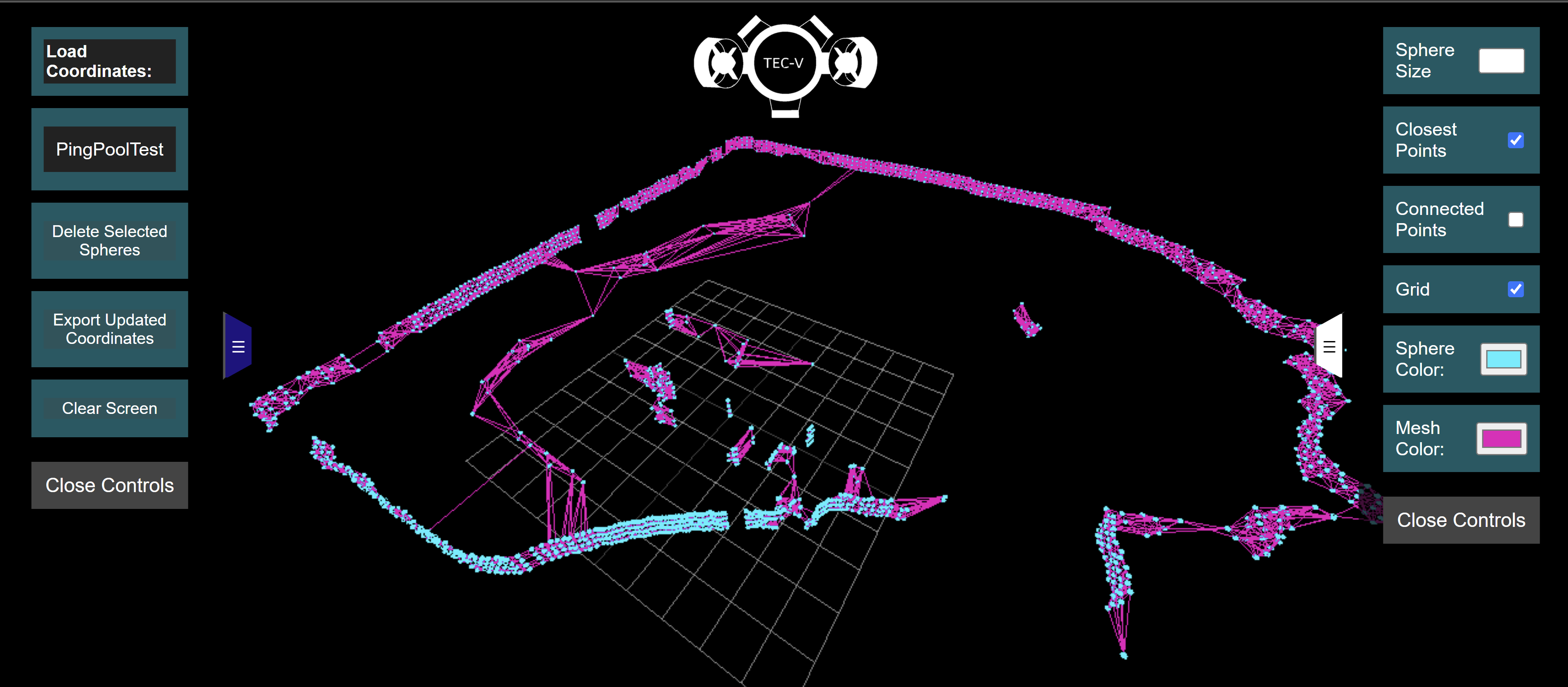
The Topographic Exploration Cave Vehicle (TEC-V) project, spearheaded by a team at the Florida Institute of Technology, is a initiative in the realm of underwater exploration technology. Initially conceived as a thesis project two years ago and then expanded upon by the current project lead, TEC-V has undergone significant evolution through three design iterations. The core vessel was initially developed by a collaborative effort involving two members from the Ocean Engineering department and one from the Mechanical Engineering department. Upon the involvement of the Computer Science team, the project saw new technological integration, including the implementation of sonar systems. The Computer Science team focused on harnessing Python for data acquisition processes and employed JavaScript for dynamic 3D visualization, creating a tool for real-time interaction with underwater environments. This integration has allowed for the generation of interactive l models essential for both research and explorative missions in submerged cave systems. The ongoing enhancements in TEC-V aim to focus on autonomous underwater navigation and mapping, emphasizing precision, efficiency, and user engagement.Project Objective
The primary objective of the TEC-V project is to advance underwater exploration capabilities through the development of an Remotely Operated Vehicle (ROV) equipped with sonar technology and a user-friendly software interface. This system aims to facilitate three-dimensional mapping of submerged cave systems, enhancing both the understanding and accessibility of these challenging environments.Manufacturing Design Methods
Sonar Technology: Utilization of the Ping 360 sonar and Omniscan 450 FS sonar for environmental scanning and data accuracy. Software Development: Implementation of Python for backend data handling and JavaScript (using the three.js library) for frontend 3D data representation. Cloud Plot Webpage: A central feature of the project, this webpage facilitates the interaction with the data collected by allowing users to visualize, manipulate, and analyze 3D models of the scanned environments. Features include rotational adjustments, multi-file integration, and enhanced data accuracy through algorithmic adjustments.Future Works
Autonomous Navigation: Refining algorithms for improved AUV autonomy to enhance navigational capabilities in complex underwater environments. Sonar Integration: Expanding the compatibility of the Cloud Plot Webpage to support various sonar data formats and integrating more advanced data processing algorithms to ensure higher accuracy and reliability. User Interface Improvements: Continual enhancement of the Cloud Plot Webpage to improve user experience and data interaction, specifically focusing on the ease of use, accessibility, and functionality across different devices and platforms. Comprehensive Testing: Conducting extensive field tests in various underwater environments to validate and refine the system's functionality and accuracy.
Binary Star System Supernovae Leading to Hypervelocity Stars

Team Leader(s)
Kayla RossTeam Member(s)
Kayla Ross, Wesley KozanFaculty Advisor
Dr. Donald C. Warren IIIProject Summary
A hypervelocity star occurs when it is traveling at thousands of kilometers per second, while stars normally travel at only hundreds of kilometers per second. One theory of how this happens is a binary star system, meaning two stars are in orbit around each other. It is thought that when one of the stars explodes into a supernova, the remaining star then gains the energy to travel at thousands of kilometers per second. In addition to this uncertainty, binary star system supernovae are rarely modeled to visualize the code and what is physically occurring.Project Objective
The purpose of this project was to write a code tackling these two issues; hypervelocity stars and the lack of visualizing code for supernova explosions.Manufacturing Design Methods
In Jupyter Notebook, a mix of Python and VPython was used to create a simulation of a binary star system, where one star goes supernova.Analysis
When modeling the star system, the initial mass of the stars and the initial distance between each star have a bigger effect on the system’s outcome compared to the initial radius of the star.Future Works
More trials need to be done by making specific comparisons relating different orbit shapes as well as adding more stars into the system.Phylogeography of Deep-Water Snappers in Honduras and Belize
Team Leader(s)
Makenna BeehlerTeam Member(s)
Makenna BeehlerFaculty Advisor
Dr. Toby Daly-EngelProject Summary
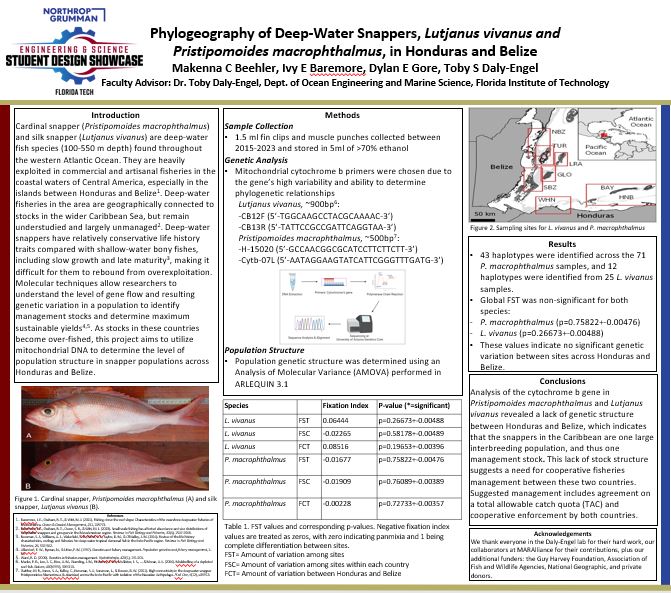
Silk snapper (Lutjanus vivanus) and cardinal snapper (Pristipomoides macrophthalmus) are deep-water fishes (100-550 m depth) found throughout the western Atlantic Ocean. They are heavily exploited in commercial and artisanal fisheries in the coastal waters of Central America, especially in the islands between Honduras and Belize. Genetic patterns are frequently documented in shallow coastal fishes, but similar studies on deep-water fishes are less common, and therefore genetic assessments are needed to determine stock structure and make effective management recommendations for deep-water fisheries in these countries. Deep-water fisheries in Honduras and Belize are geographically connected to stocks in the wider Caribbean Sea, but remain understudied and largely unmanaged. Deep-water snappers have relatively conservative life history traits compared with shallow-water teleosts, including slow growth and late maturity, making it difficult for them to rebound from overexploitation. We utilized DNA samples taken from snappers across 12 island and coastal locations throughout Honduras and Belize to determine the number of evolutionarily distinct groups and potential management units. We sequenced 500-900 base pairs of the mitochondrial cytochrome b gene and performed Bayesian phylogeographic analysis and genetic connectivity (FST). Preliminary results indicate a lack of genetic structure between Honduras and Belize in both species of snappers, identifying them as a single management stock. These results shed new light on the stock structure of deep-water snappers in the Caribbean, providing a context for management that spans international borders.Project Objective
The goal of this research is to utilize mitochondrial DNA to determine the genetic structure of deep-water snapper stocks in Honduras and Belize to guide implementation of fisheries management in these regions.Manufacturing Design Methods
Tissue samples were collected from two species of deep-water snappers, Pristipomoides macrophthalmus and Lutjanus vivanus, across 12 sublocations throughout Honduras and Belize. We then selected primers for the mitochondrial cytochrome b gene due to it's variability and application in phylogenetic studies. DNA was extracted using the salting-out method. Our selected primers were utilized for amplification of the cytochrome b gene during polymerase chain reaction (PCR) and were sent for sequencing at the University of Arizona Genetics Core. Sequences were cleaned and aligned using Geneious prime software. These sequences were analyzed in ARLEQUIN 3.1 where an Analysis of Molecular Variance (AMOVA) was performed to determine the level of genetic structure present in Honduras and Belize.Analysis
FST values were non-significant for both species of snapper, indicating a lack of genetic structure in Honduras and Belize. This suggests one large, interbreeding population and one management stock. This lack of genetic structure suggests a need for cooperative fisheries management between these two countries.Future Works
Future work on this project will consist of obtaining nuclear DNA primers to perform similar procedures on these snappers and combine with our results from mitochondrial DNA due to their differential modes of inheritance and varying mutation rates.Acknowledgement
We thank everyone in the Daly-Engel lab for their hard work, our collaborators at MARAlliance for their contributions, plus our additional funders: the Guy Harvey Foundation, Association of Fish and Wildlife Agencies, National Geographic, and private donors.Maximizing Nitrogen Removal in a Bioreactor by Adjusting C:N Ratios and Residence Times
Team Leader(s)
Mary MacDonaldTeam Member(s)
Mary MacDonaldFaculty Advisor
Dr. Austin FoxProject Summary
Simultaneous nitrification-denitrification (SND) is limited when the depletion of oxygen decreases the ability of aerobic bacteria to oxidize nitrogen. In a bioreactor system, nitrification was promoted through the addition of oxygen plus a supplemental carbon source. Building upon previous efforts, both C:N ratios and various residence times were tested to find the best combination of decreased nutrient concentrations and throughput to achieve maximum N removal. The range of carbon-nitrogen molar ratios showed effective removals of dissolved inorganic nitrogen at ratios ≥ 9. Residence times of 5 minutes achieved 95% removal of dissolved inorganic nitrogen (DIN). By increasing the efficiency of nitrogen removal, bioreactors can be a more effective tool in combating eutrophication and improving upon water treatment methods.Project Objective
The objectives of this study were to (1) identify the optimal carbon source, (2) identify the most efficient C:N ratio using supplemental carbon and (3) improve system efficiency by identifying the ideal residence time required for maximum nutrient removal.Manufacturing Design Methods
Water from the Indian River Lagoon (IRL) was brought back to Florida Tech Marine Chemistry Lab and pumped continuously through 4, lab scale (1L) bioreactor cells. Bacteria were cultured at experimental conditions for 1 month prior to sample collection.Specification
Carbon Sources: Based on literature, carbon sources tested included Sucrose, Methanol, Acetic Acid, and Molasses. Carbon concentrations for this experiment used a 9:1 C:N molar ratio and a 0.5-hour residence time. C:N ratios: Carbon to Nitrogen molar ratios ranging from 3 to 35 were tested using sucrose as the supplemental source. Residence Times: Residence (treatment) times ranging from 8 hours to 5 minutes were tested. These residence times were dosed with a C:N molar ratios of 18 and 9 for 8 to 0.5 hours, and 15 to 5 minutes using sucrose, respectively.Analysis
DIN concentrations from the flow-through treatment show a significant decrease from all the sources 90% DIN removal with all p-values 3 achieved nearly complete removal of DIN removal with all p-values 90% removal of DIN with all p-values 3 were the most efficient. The most efficient residence time for reducing DIN was 5 minutes. Higher throughput with lower % removal can achieve greater overall N removal.Future Works
This study demonstrates the possibilities of altering supplemental carbon sources, C:N ratios, and residence times to achieve improved system performance by cultivating nitrifying-denitrifying bacteria. Continued study will test additional C:N molar ratios between 9 and 3, even shorter residence times, and test the strength of these parameters with high influent nitrogen.Acknowledgement
Thank you to Dr. Austin Fox for his advising and guidance on the project. A special thanks to Abbey Gering for conceiving this project and establishing a framework from which this project was made possible. Thank you to Stacey Fox for running the nutrient analysis, and others who helped along the way.Novel Technique using Cherenkov Radiation for Nuclear Terrorism Prevention