/prod01/fit-cdn-pxl/media/header-images/showcase-header.jpg)
Awards 2025
President's Cup
Mapping the Botanical Gardens: A Guide to Florida Tech's Greenspace

Team Member(s)
Paolo SotoFaculty Advisor
Dr. Emily Ralston, Dr. Ken LindemanMapping the Botanical Gardens: A Guide to Florida Tech's Greenspace File Download
Project Summary
The Joy and Gordon Patterson Botanical Gardens on the Florida Tech campus provides recreational green space for students, faculty, and members of the public. It also home to numerous interesting native and non-native plant species. In addition to its aesthetic and recreational qualities, it is also classified as a mixed-woods wetlands by the EPA. By being a wetland positioned at a lower elevation than the rest of campus, the gardens absorb and retain excess rainwater, preventing on campus flooding. All of the positive qualities of the gardens make it an important asset to the university. While there are existing maps of the gardens, they are outdated and don’t give a good idea of what is currently present in the gardens. This project seeks to create a modern map using GIS software that can be used by visitors to locate features of interest in the garden. By filling current information gaps, visitors are able to appreciate more of the gardens. Additionally, spatial data will be essential in guiding efforts to restore or re-vamp areas of the botanical gardens.Project Vulcan

Team Leader(s)
Project Manager: Micéle Leita Project Systems Engineer: Joshua SpectreTeam Member(s)
Testing & Validation Engineer Lead: Timur Bedelbaev Mechanical Engineer Lead: Braden Hartlieb Project Manager: Micéle Leita Propulsion Engineer: Matthew Poirier Simulation and Modeling Engineer Lead: Jorge Sanchez Testing & Safety Engineer Lead: Abigail Smith Project Systems Engineer: Joshua Spectre Propulsion Engineer Lead: Cam’Ron Valliere Additive Manufacturing Engineer Lead: Victor ZahariaFaculty Advisor
Dr. Firat IrmakProject Vulcan File Download
Project Summary
Project Vulcan aims to advance propulsion technology by developing a proof-of-concept metal 3D-printed clustered aerospike engine featuring an integrated Liquid-Injected Thrust Vector Control (LITVC) system. Aerospike engines, known for their unique altitude compensation properties, offer theoretical efficiency across varying altitudes, potentially outperforming traditional bell nozzles. The addition of an LITVC system promises enhanced control, making this a significant contribution to propulsion technology. Project Vulcan is developed in partnership with Vaya Space, aligning with their small launch vehicle, Dauntless, designed for cost-effective space access. Vaya Space focuses on sustainable and affordable launch solutions, particularly in the small satellite market. This collaboration provides Project Vulcan with practical relevance, placing it within the context of industry developments and directly supporting applications in commercial and research satellite launches. Through this effort, we aim to gain insights into the feasibility, performance, and optimization of the LITVC system, enhancing future designs and implementation strategies. Our objectives include designing, constructing, and validating an aerospike engine through static fire testing with solid rocket motors. The project will use iterative additive manufacturing, a custom-built test stand, an altitude-simulating shroud, and a tunable Ansys model to optimize performance, streamline virtual testing, and reduce the need for physical prototypes. Safety is prioritized in alignment with Vaya Space’s protocols, ensuring risk mitigation during testing. By the end of the academic year, Project Vulcan will deliver a validated prototype with comprehensive data, contributing valuable insights to next-generation propulsion systems.Project Objective
The objectives of Project Vulcan center on validating the performance, manufacturability, and control capabilities of a clustered aerospike engine with integrated LITVC. The aerospike shall withstand a 3-second static fire test using solid rocket motors to simulate real-world flow conditions, ensuring aerodynamic efficiency and structural durability under operational stress. It shall be fabricated using additive manufacturing technologies to take advantage of intricate design fidelity, rapid prototyping, and optimized structural performance. The aerospike must be fully compatible with the custom-designed test stand to streamline integration and minimize the need for adjustments during testing. Additionally, an altitude-simulating shroud shall be designed and fabricated to interface with the aerospike system, enabling accurate performance assessment across a range of atmospheric conditions. Finally, the aerospike shall incorporate a Liquid-Injected Thrust Vector Control (LITVC) system, allowing precise thrust vectoring through liquid injection into the exhaust flow and expanding control authority over the engine’s performance envelope.Manufacturing Design Methods
Due to the complexity of the aerospike geometry, advanced manufacturing methods needed to be applied to account for the interior cooling lines. To enable this, laser-powder bed fusion (LPBF) was selected as the optimal manufacturing method. LPBF is a metal printing technique that uses lasers to melt layers of microscopically thin material. To ensure that the aerospike design could be manufactured successfully, certain requirements were set in place. This included having a minimum 45º angle to reduce the need for support structures, a teardrop shape for any interior cooling lines that were originally circular, once again to minimize the need for support structures. The final requirement was ensuring a minimum 2 mm thickness throughout the geometry. This is to ensure proper metal fusion and reduce the chances of warping with each added layer. To prepare the aerospike geometry for the high-stress thermal environments, both thermally and in the context of the expected high pressure, a heat treatment was done to set the internal crystal structure to the right specifications. The material of choice was AlSi10Mg. This was chosen due to its high thermal conductivity as well as its price. The selected manufacturer was MIMO Technik, a 3D metal printing company that specialized in LPBF.Specification
Metal 3D-Printed Aerospike: The metal 3D-printed radial aerospike engine represents a complex integration of advanced manufacturing, fluid dynamics, structural resilience, and data acquisition, culminating in a system designed for high-temperature, high-pressure static fire testing. The system-level components have been carefully developed to ensure a seamless and controlled testing environment at the Vaya Space facilities. Test Stand: The custom-built test stand replicates a Stewart Platform and serves as the structural foundation for the aerospike engine, securing it against thrust forces up to 1.5 kN. The stand incorporates two steel plates, clevis brackets, spherical brackets, and load cells, ensuring accurate force measurement and stability. Two rings of M12 and M10 bolts are used to secure the model flange to the test stand for maximum structural integrity. The base is then bolted to the concrete floor at the Vaya Space test site during firings to ensure secure stabilization. The test stand was specifically designed to take measurements in 6 degrees of freedom (DOF). This is done to avoid constructing two different test stands for thrust and LITVC. Altitude Simulation Shroud: An altitude-simulating shroud compatible with the aerospike design will be placed around the nozzle. This shroud will create controlled localized pressure drop, simulating ambient atmospheric conditions experienced at various altitudes during a rocket launch. Thrust and pressure data will be recorded to validate the performance of the shroud and to evaluate how the aerospike performs under reduced ambient pressure, assessing its altitude-compensating efficiency.Analysis
The team utilized engineering tools and methods to validate the propulsion system and ensure the desired performance and survivability of the system. Computational Fluid Dynamics (CFD) simulations in ANSYS Fluent were employed to analyze flow behavior and predict pressure and thermal loads on the nozzle. Thermal survivability of the structure was verified using a combination of heat transfer data extracted from custom field functions written in Fluent and MATLAB-based heat transfer coefficient calculations. These coefficients were then applied in ANSYS Structural for a comprehensive thermal analysis. Subsequent structural simulations incorporated both thermal and pressure boundary conditions to confirm the system's integrity under expected operating conditions. The cooling system, critical to the survivability of the aerospike, was analyzed through a combination of MATLAB and CFD in Fluent to determine pressure losses and the required flow rate necessary to sustain effective heat removal. The altitude-simulating shroud design incorporated pressure analyses using two methods: MATLAB-based calculations and Fluent CFD simulations. MATLAB employed simplified isentropic flow equations, combining nozzle throats into a single equivalent throat and predicting an internal pressure of approximately 6,334 Pa. In contrast, Fluent CFD simulations realistically modeled the geometry, capturing complex flow behaviors and interactions between individual nozzles, resulting in a higher internal pressure prediction of about 10,000 Pa. The 44.9% discrepancy between MATLAB and Fluent primarily arose from MATLAB's assumptions of ideal, frictionless, and isentropic conditions, and its simplification of multiple nozzles into one. Consequently, Fluent's higher predicted pressure was adopted as the simulated altitude condition.Future Works
With more time and resources, we’d implement a hybrid system akin to Vaya Space to better mimic their system to fortify LITVC performance at a smaller scale in their architecture.Other Information
LinkedIn Page: linkedin.com/in/projectvulcan Instagram Page: https://www.instagram.com/project_vulcan_floridatech?igsh=MTB0NWVlMnNieG96aw==Acknowledgement
We would like to acknowledge the generous support of our sponsors: Educate the Children Foundation, MIMO Technik, Panther Works, Solideon, and Vaya Space. We extend our sincere thanks to our capstone coaches—Brooks Kimmel, Kineo Wallace, and Carson Zide—for their guidance throughout the project. We also wish to recognize the invaluable contributions of Florida Tech faculty members Felix Gabriel, Niall Harris, Dr. Firat Irmak, Dr. Daniel Kirk, Dr. Ilya Mingareev, Dr. Hamidreza Najafi, and Dr. Eric Swenson for their expertise and continued support.Northrop Grumman Best in Show Awards
Biochar Remediation of Regolith Leachate
Team Leader(s)
Mia MarkietTeam Member(s)
Mia MarkietFaculty Advisor
Dr. Andrew PalmerBiochar Remediation of Regolith Leachate File Download
Project Summary
As global populations rise and climate instability worsens, the threat of soil degradation and contamination grows, impacting food security and agricultural sustainability. Over 33% of the world's arable soils are polluted with heavy metals like cadmium (Cd), Chromium (Cr), and arsenic (As), which reduce soil fertility, impair crop growth, and pose risks to human health. Biochar, a carbon-rich product of pyrolyzed organic material, has shown promise on Earth as a soil amendment capable of immobilizing heavy metals and improving soil quality. Its adsorption capacity is influenced by surface area, pore size, and functional groups. Martian regolith simulant mimics contaminated terrestrial soils and gives us a good analog for pollution remediation on Earth and developing extraterrestrial agriculture. This study investigates the effectiveness of pine biochar in adsorbing heavy metals from Exolith™ Martian regolith simulant leachate, for Earth-based remediation and off-planet agriculture. Regolith was leached using 0.5 M HCl to extract bioavailable metals into solution, then treated with 1–20% biochar by volume. Samples were shaken for 72 hours at 25 °C, filtered, and analyzed using Inductively Coupled Plasma Optical Emission Spectrometry (ICP-OES). Z-tests compared treatment groups to the 0% control (pDemonstrator for Autonomous Rapid Transport (DART)

Team Leader(s)
Project Manager: Brett Lougheed, Systems Engineer: Nathan TardyTeam Member(s)
Luke Aagaard, Kian Jamal, Brett Lougheed, Jack O’Hara, Zuleyka Priscila Figueroa Pineda, Jack Smith, Rylen Struthers, Nate Tardy, McKennah Vale, Johann VenninkFaculty Advisor
Dr. Firat IrmakSecondary Faculty Advisor
Dr. Darshan YadavDemonstrator for Autonomous Rapid Transport (DART) File Download
Project Summary
The main motivation for this design project is to satisfy a desire from the USSF to possess the capability to deliver global payloads in less time than required by conventional means (i.e., cargo planes). The importance of this project lies in the aerospace industry's trend towards reusable, propulsive-landing rocketry. The project's main objective is to demonstrate a targeted, propulsive landing before the 2025 Senior Design Showcase. To reach this goal, three subsystems have been created: Controls, Propulsion, and Structures. The team has completed many incremental objectives, including static fire tests, abort system tests, ascent tests, and attitude control tests. These tests have informed the final design so that it meets the requirements set forth.Project Objective
The primary goal of the DART project is to demonstrate the feasibility of autonomous, propulsive landing in a reusable model rocket. The vehicle must carry a payload representing at least five percent of its total mass, operate without human input during flight, and complete a point-to-point delivery within a defined landing zone, all while remaining compliant with Class 1 amateur rocketry regulations.Specification
The rocket was limited to a total mass of 1500 grams, ensuring compliance with Class 1 amateur rocketry rules. It was required to achieve a minimum altitude of 75 meters and a lateral displacement of at least 50 meters. The vehicle was also designed to land within a 5-meter radius target zone and to remain upright for five seconds after landing. At least 80 percent of the rocket’s mass was required to be reusable, and the system had to carry a payload equal to or exceeding 5 percent of its total weight.Analysis
A comprehensive analysis was conducted across all subsystems to validate the rocket’s performance and safety. Structural and thermal analyses were performed using ANSYS to ensure the critical components could withstand the mechanical stress and heat loads experienced during launch and descent. Finite Element Analysis (FEA) was used to evaluate the strength and deflection of the airframe, mounting structures, and landing legs under both static and dynamic loads. Thermal simulations assessed the exposure of components, particularly near the ascent and descent motors, to high temperatures, confirming material choices and ensuring electronics were shielded appropriately. Aerodynamic behavior was analyzed using Computational Fluid Dynamics (CFD) simulations conducted in ANSYS Fluent. These simulations characterized the pressure distribution, flow separation, and aerodynamic stability of the rocket during various flight phases. The team also used RocketPy and MATLAB to develop trajectory simulations and verify system-level requirements such as altitude, lateral displacement, and landing zones. Monte Carlo simulations assessed the sensitivity of the flight path to initial conditions and wind variations. To manage descent, a Proportional-Integral-Derivative (PID) controller was implemented to control the thrust vectoring system. Finally, a flight envelope was generated to define safe flight corridors, enabling the autonomous abort logic to detect off-nominal behavior and trigger a parachute recovery when necessary.Future Works
DART serves as a testbed for precision landing techniques in small-scale, reusable rockets. It enables future research in TVC, GNC, and rapid-response delivery systems. The project expands Florida Tech’s capabilities in autonomous rocketry and experimental controls. Future work includes advanced controller development and precision guidance capabilities.Acknowledgement
The team thanks our faculty advisors, Dr. Firat Irmak and Dr. Darshan Yadav, our graduate student assistant, Steven Holmberg, and the Florida Tech HSDC staff for their support with this endeavor. Special thanks also go to Spaceport Rocketry Association (SRA) and Regional Orlando Applied Rocketry (ROAR), two sections of the National Association of Rocketry that facilitated flight tests for the team and shared invaluable rocketry expertise.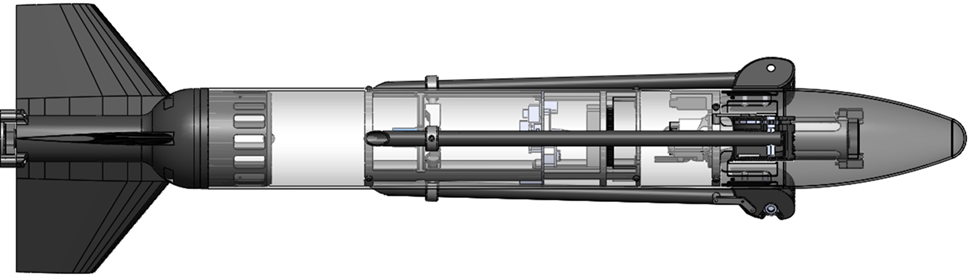
Honors College Award
Regolith Conditioning by Carnivorous Plants
Team Leader(s)
Emily SoucyTeam Member(s)
Emily SoucyFaculty Advisor
Andrew PalmerRegolith Conditioning by Carnivorous Plants File Download
Project Summary
Further exploration of the solar system, particularly the Moon and Mars, will require the establishment of food production systems that are reliable and self-sustaining. Regolith-based agriculture presents a potential method for ensuring food security by incorporating In Situ Resource Utilization (ISRU) and Bioregenerative Life Support Systems (BLSS) methods for functioning. However, these regoliths will require conditioning prior to agricultural use due to the presence of heavy metals that can accumulate in crops and pose health hazards to both plant and astronaut health. Using plants with phytoremediating capabilities to convert the regolith into soil by removing toxins while incorporating biological material offers a partial remedy to the regolith challenges. Carnivorous plants, such as Utricularia vulgaris may act as a remediator organism for its abilities to survive in low nutrient environments and to accumulate several heavy metals that are present in both lunar and Martian environments in hazardous amounts. We hypothesize that several Utricularia species and their associated microbiomes will be able to successfully capture heavy metals from lunar regolith and provide ‘remediating’ services that condition the regolith into a more soil-like substrate. In the present study, we further characterize the phytoremediation potential of U. vulgaris and establish growth protocols and baselines for U. subulata, a terrestrial variant.Future Works
Compare growth of the plants in and out of regolith using the methods developed here to observe plant stress and the efficacy of remediation efforts.Tomographic Medical Image Reconstruction with Deep Learning
Team Leader(s)
Asher BurrellTeam Member(s)
Chris Hinton, Asher Burrell, Thomas MercerFaculty Advisor
Debasis MitraSecondary Faculty Advisor
Philip ChanTomographic Medical Image Reconstruction with Deep Learning File Download
Project Summary
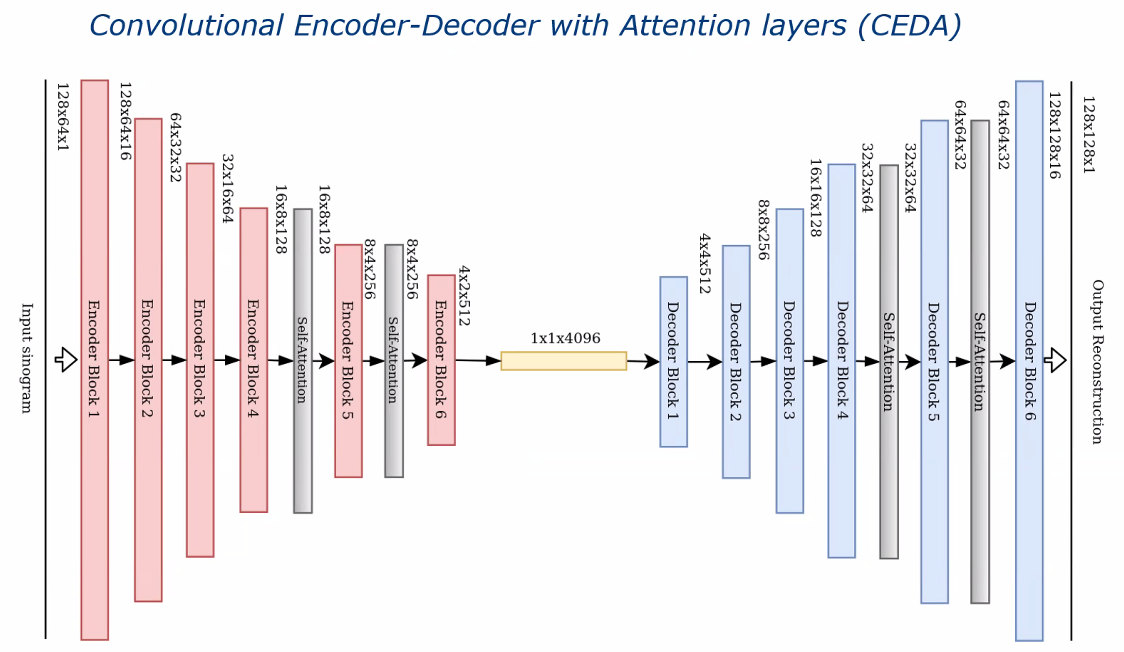
Currently, medical imaging with iterative statistical algorithms takes about 30 seconds. Our project uses deep learning to reduce this time to milliseconds, allowing massive amounts of data to be generated in a small amount of time. Additionally, our project includes synthetic data generation, allowing us to get good results without training on real data. Finally, our system includes an AI model that can take a raw sinogram file of a human heart and perform an inverse Radon transform to produce a reconstruction of the original heart image slice in standard 3D space.Future Works
There is another senior project group that will extend this work by introducing a federated learning system for training the machine learning model. They will also expand the current ML model in order to perform reconstructions on sinograms from diseased heart patients.Acknowledgement
We received assistance from: Dr. Bob Coni of the Burrell College of Osteopathic Medicine; Dr. Paul Segars of Duke University School of Medicine; the former and current members of Dr. Mitra's Biocomputing Lab and the Federated Learning of Medical Image Reconstruction senior design team, particularly Tommy Galletta, Samuel Boddepalli, Aniket Dhanawade, Charlie Collins, Josh Sheldon, Izzy MacDonald, Yash Jani, and Tanuj Kancharla; and Dr. Ryan White. Data was provided by Dr. Youngho Seo from the University of California, San Francisco. This work is supported by NIH funding R15EB030807.Best in Show Awards
SLOSH: System for Liquid Orbital Supply and Handling

Team Leader(s)
Angela Alexy (PM), Jacob Broussard (SE)Team Member(s)
Andrew Dean, Danielle Garceau, Joshua Grady, Beck Kerridge, Brendan Smucker, Riley Wagner, Colin ZelaskoFaculty Advisor
Dr. Firat IrmakSecondary Faculty Advisor
Dr. Daniel KirkSLOSH: System for Liquid Orbital Supply and Handling File Download
Project Summary
Achieving sustained presence in orbit and enabling space missions to more distant destinations will require advancements in on-orbit servicing technologies with cryogenic propellants. Without gravity settling, fluid distribution becomes very difficult to manage inside propellant tanks, and possible vapor ingestion could lead to full system failure. Mission tailored Propellant Management Devices (PMDs) are flight-proven, passive devices positioned over a tank outlet to ensure vapor free propellant delivery to the system, while also meeting flow rate demands. Project SLOSH explores relevant fluid management theory directed towards the challenges microgravity would pose in making these advancements a reality.Project Objective
Project SLOSH aims to design and conduct quantitative tests to evaluate performance characteristics of a PMD optimized for handling cryogenic oxidizer. The team also aims to design two testing apparatuses in order to simulate operating conditions for experiments.Acknowledgement
The team would like to thank the project advisor Dr. Daniel Kirk for his invaluable technical guidance and generosity, as well as Dr. Firat Irmak and Dr. Eric Swenson for their support during the Senior Design capstone process.P.E.A.N.U.T.S.: Promoting Extraterrestrial Agriculture through Novel Utilization Techniques for Sustainability
Team Leader(s)
Trenton CauseyTeam Member(s)
Trenton CauseyFaculty Advisor
Dr. Andrew PalmerP.E.A.N.U.T.S.: Promoting Extraterrestrial Agriculture through Novel Utilization Techniques for Sustainability File Download
Project Summary
Space Crop Production has been deemed mission-critical for the success and safety of extraterrestrial missions. To limit resupply missions, regolith-based agriculture is a potentially cost-effective method but proposes physical and chemical challenges to plant growth. Peanut shells are a highly lignocellulosic inedible waste product of peanut plants, making them difficult to quickly decompose. This project aims to utilize a lignocellulosic recycling technique to mitigate several plant growth challenges. To do this, peanuts have been proven to grow and reproduce in regolith, and mixtures of peanut shells and regolith have been characterized as a soil for plant growth.Project Objective
Here we aim to improve plant growth through a novel regolith amendment strategy utilizing peanuts. This strategy specifically aims to mitigate the dense compaction, high drainage, and alkaline pH presented by extraterrestrial regolith simulants.Manufacturing Design Methods
Task 1: Grow peanuts in a regolith simulant to prove feasibility and quantitatively compare against soil growth. Task 2: Create peanut shell-regolith mixtures for plant growth. Task 3: Characterize the sterilized mixtures for plant growth, water holding capacity, pH, and density.Analysis
Peanuts can viably grow in Martian Mojave Simulant with little amendment insisting they are a viable candidate for regolith-based agriculture. Peanut shells mitigate the densely compactible, alkaline, high drainage LHS-1 to create a more favorable substrate for plant growth. Increases in plant size and amount justifies peanut shell-amended regolith as a plant-growth substrate.Future Works
Expansion of regolith types, optimization of growth, growth trials repetition.Neurodevelopmental defects in a tauopathy model are affected by the microtubule stabilizer PTRN-1
Team Leader(s)
Katrina E. DielTeam Member(s)
Katrina DielFaculty Advisor
Melissa A. BorgenNeurodevelopmental defects in a tauopathy model are affected by the microtubule stabilizer PTRN-1 File Download
Project Summary
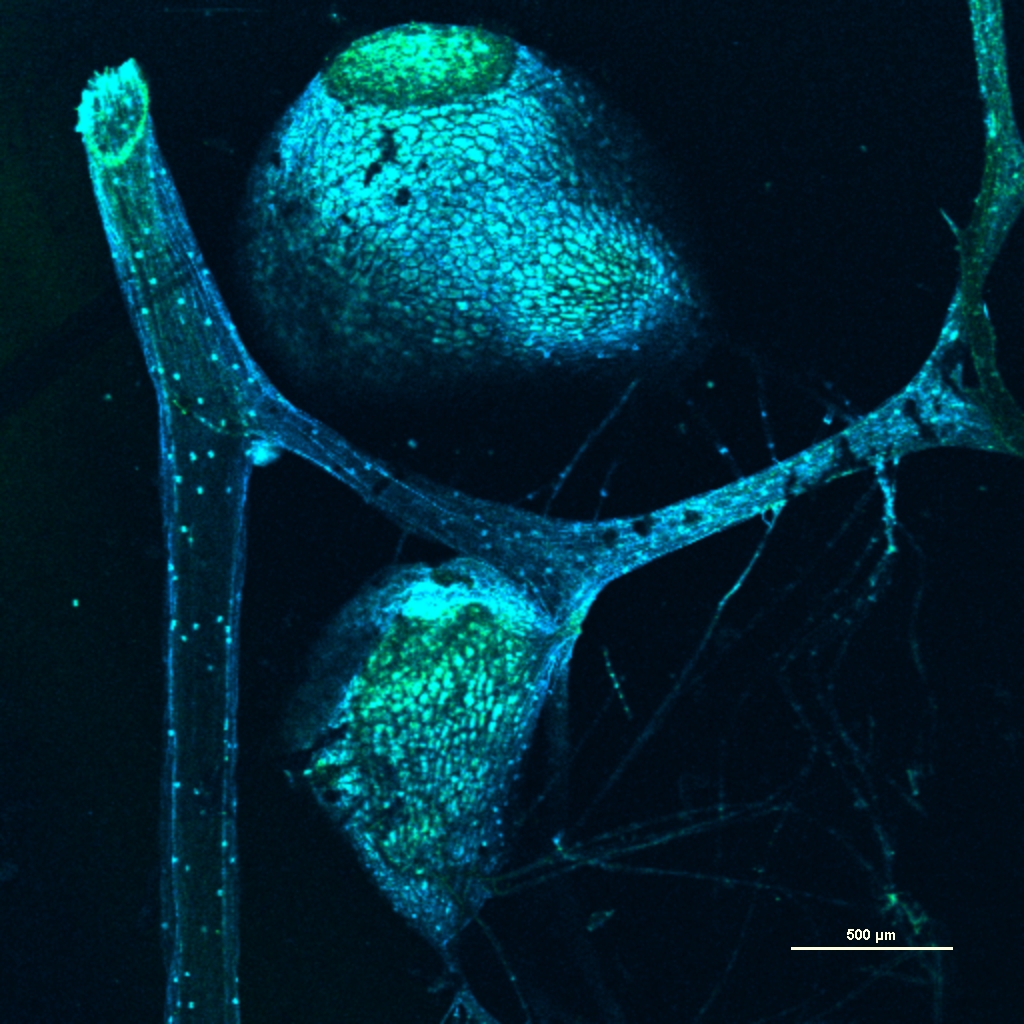
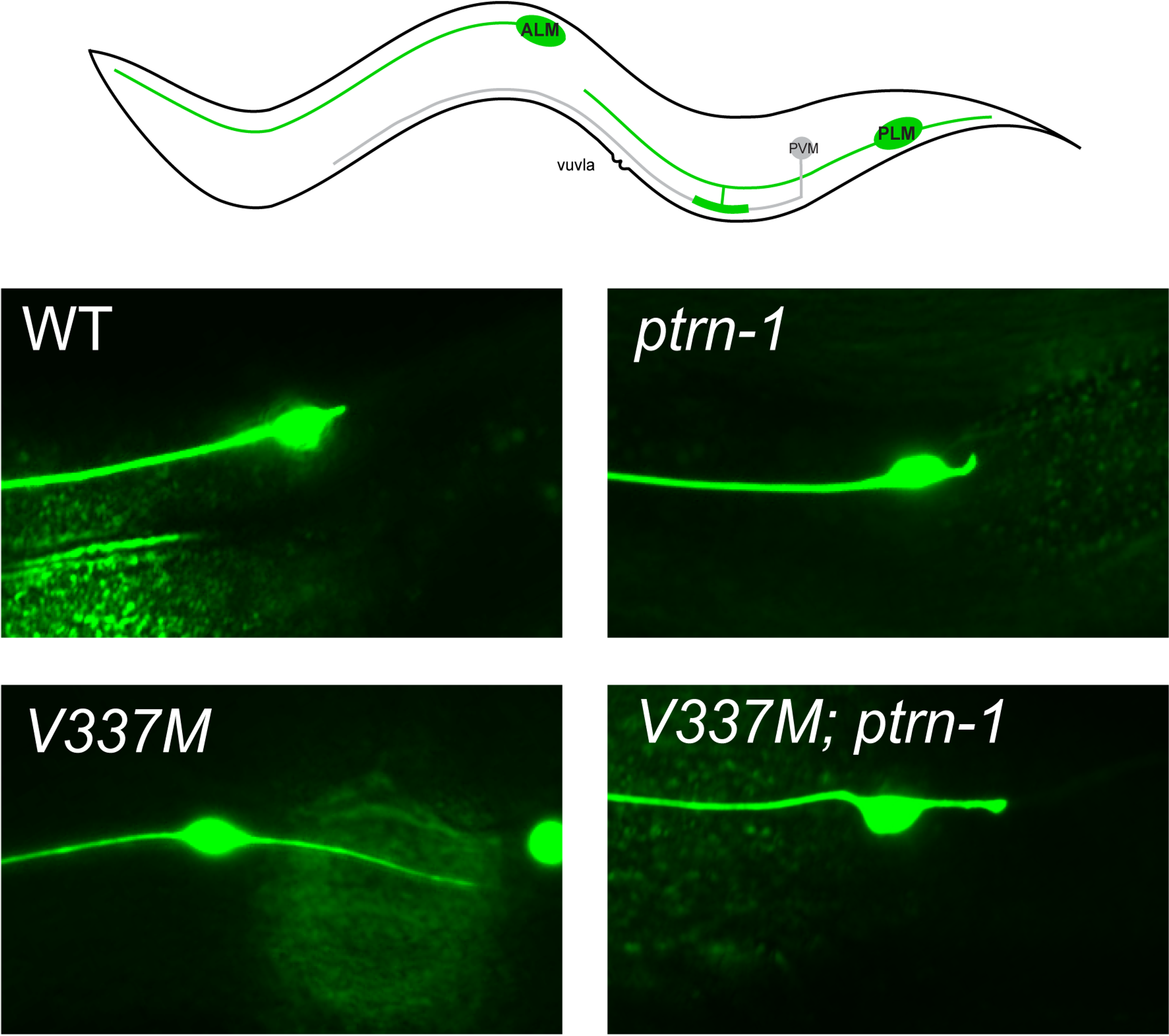
Alzheimer’s Disease and other Dementias are thought to arise from the aggregation of proteins, particularly Tau. Additionally, Tau aggregation into neurofibrillary tangles also results in the loss of Tau’s native function: stabilizing microtubules. Microtubule stability is critical for axon maintenance and function. As protein aggregation has been the central research area, there has been considerably less focus on the cellular and molecular impacts of modulating microtubule stability in neurodegenerative disease models. Here, we use a “humanized” C. elegans tauopathy model for Frontotemporal Dementia. We aim to uncover the genetic and molecular underpinnings of degenerative phenotypes, using the mechanosensory neurons to look for both developmental and degenerative effects. This project focuses on the relationship between tauopathy and the microtubule-binding protein, PTRN-1/CAMSAP, which functions in axon termination and synapse formation. In this study, we will 1) identify the role of PTRN-1 in degeneration and 2) assess the effects of modulating microtubule stability on tau-related degeneration.SmartStride
Team Leader(s)
Alec AnzaloneTeam Member(s)
Alec Anzalone, Kiera Ceely, Cianna Grummer, Bela Perdomo, and Caleb PhillipsFaculty Advisor
Dr. Linxia GuSecondary Faculty Advisor
Dr. Philip ChanSmartStride File Download
Project Summary
SmartStride is a wearable technology designed to support the rehabilitation of individuals with Idiopathic Toe Walking (ITW), a condition where individuals habitually walk on their toes without a clear neurological or orthopedic cause. If left untreated, ITW can lead to long-term gait abnormalities and muscle issues. The SmartStride system integrates Electromyography (EMG), Inertial Measurement Units (IMUs), and machine learning to track and analyze gait patterns. Data collected from sensors embedded in a compression sock is transmitted via Bluetooth, and then the data is run through a machine learning model on the Raspberry Pi 5 to classify severity, and displayed and stored using Amazon Web Services (AWS). This platform allows clinicians to monitor patient progress remotely, view session data, and make informed treatment decisions based on objective biomechanical insights. Our team developed a functioning prototype that includes modular sensor housing, wireless communication, and an intuitive web interface for both patients and clinicians. By enabling session-based monitoring and data-driven analysis, SmartStride provides a more accessible and personalized approach to ITW rehabilitation.Project Objective
The objective of this project is to design and develop a wearable rehabilitation system for individuals with ITW that enables monitoring, quantitative gait analysis, and remote clinician access. The system uses Electromyography (EMG) and Inertial Measurement Units (IMUs) to collect muscle and motion data, which is processed using machine learning algorithms to identify abnormal gait patterns. A secure web-based platform supports clinician-patient interaction by displaying session data and progress metrics, facilitating personalized, data-driven treatment plans aimed at improving rehabilitation outcomes.Manufacturing Design Methods
The manufacturing of this device was focused on the ease of production, interchangeability, and consumer/patient use. This was accomplished through the leveraging of additive manufacturing and commercially available parts. First, to allow a single device for multiple age ranges, a soft spandex compression sock was used to stretch and expand, allowing for various sizes of feet to work with this device. To account for the changing dimensions permitted by the compression sock, Velcro was used to reposition sensors to ensure dimensional accuracy between trials. From a manufacturing standpoint, additive technologies were used to create the individual sensor cases. This allowed for rapid production at a minimized cost standpoint. Additionally, it allowed for easy changes to develop the final sensor case design. Finally, using commercially available parts allows for easy swap and integration. Due to the simplified electronic design, the cost stayed low and can be easily repaired.Analysis
We successfully developed a wearable rehabilitation device that combines Electromyography (EMG) and Inertial Measurement Unit (IMU) sensors to monitor gait in individuals with Idiopathic Toe Walking (ITW). The system offers a data-driven approach to assess rehabilitation progress by capturing and analyzing muscle activity and movement patterns. To support clinician engagement, we created a user-friendly web interface that visualizes patient data and tracks progress over time. Additionally, the device was designed with customizable sensor placement, allowing it to adapt to various users and ensure accurate data collection.Future Works
Incorporate haptic feedback into the device for faster rehabilitation. As well as collaborate with the Scott Center on campus to integrate the project with patients suffering from ITW.Acknowledgement
A sincere thank you to Dr.Linxia Gu, Mohamed Ahmed, and Michael Grillo for their support and help throughout our project creation.Recycling of Flexible Polyurethane Foams Using Glycolysis
Team Leader(s)
Sarah PezzentiTeam Member(s)
Sarah Pezzenti, Tyler D’Amato, Susan Nelson, and Antonella MerolaFaculty Advisor
Jonathan WhitlowRecycling of Flexible Polyurethane Foams Using Glycolysis File Download
Project Summary
Polyurethane (PU) is an organic polymer joined by repeating carbamate (urethane) groups with a wide range of technological and daily applications, as it can be used as either rigid or flexible plastic. It is the 6th most used polymer in the world, with 18 million tons produced per year. Some uses consist of the insulation of refrigerators and freezers, building insulation, and cushioning for furniture and mattresses. It can also be used for bonding materials like wood, concrete, and metal. Polyurethane foams are classified into three types: conventional, viscoelastic, and high resilience. Most commonly, viscoelastic foam is used to produce mattresses and pillows. This project will recycle old mattresses, specifically the polyurethane component, to be used for future use. Most mattresses are thrown away into landfills, and this process would reduce the amount of mattresses that are disposed of. While recycling mattresses is not inherently a unique idea, utilizing such a specific process is unique. To encourage people to turn in their mattresses a buy back system will be implemented. This system will measure the weight of the mattress, and based on the total weight of the foam will give the individual who turned it in $0.30 per pound. Most mattresses vary between 50 to 150 pounds, depending on the type, so on average people will get $30 per mattress turned in. There will be various sites around the Austin area to decrease the amount of driving time people will have to drive, and to encourage people to turn in their mattresses by making it more convenient. An alternative option to the buy back system would be a reward or discount system. This involves the company who purchases our product of polyols to give us coupons for our recyclers. This way people will get a discount on their next mattress, and it encourages people to turn their old mattresses in while they’re in the market for a new one. The first few years of production will keep the $0.30 per pound buy back system, until the company is settled enough and comfortable in its own operation to negotiate with our customers to try and get alternative rewards to those who turn in their mattresses.Project B.E. D.R.I.P.

Team Leader(s)
Gabriel KuntzTeam Member(s)
Gabriel Kuntz, Lindsey Shapiro, Callie Siering, Elijah Doan, Parker Hathaway, Marguerite Fidd, Elizabeth ArrajjFaculty Advisor
Troy NguyenSecondary Faculty Advisor
Nicolas VelasquezProject B.E. D.R.I.P. File Download
Project Summary
This is a Botanical Garden restoration project using civil engineering and construction solutions to improve the overall safety, minimize erosion, flooding, and pollution in the Botanical Garden. This project will improve the Botanical Garden so it can remain the heart of the Florida Tech campus and community.Project Objective
Our solution offers both practical and environmental benefits that improve the landscape and ensure long-term stability. Together, the living shoreline and rain garden minimize the need for hard infrastructure and costly maintenance, while creating spaces that thrive with minimal intervention. Importantly, they also address current safety concerns by reducing unstable soil settlement, helping to prevent uneven concrete walkways and other safety concerns within the garden. Overall, these solutions ensure the botanical garden remains safe, structurally sound, and inviting for generations of students, faculty, and visitors to enjoy as a lasting part of the campus community.Manufacturing Design Methods
Living Shoreline Rain Garden Restoration of Walkways Pollution Prevention Measures Rebuilding Retaining WallAnalysis
The team performed sieve analysis of the soil in the Botanical Garden to determine the roughness coefficient of the stream. Additionally, we determined the bathymetry of the stream and modeled it using HEC-RAS to determine pre and post solution velocities.Future Works
Florida Tech will review our proposal/report and can use the information to actually carry out our vision for the Botanical Garden. In addition, future classes can use the Botanical Garden and its improvements as a living laboratory and for future senior design projects as well.Acknowledgement
A Special Thank You to Our Sponsors! Dr. Joy Patterson & Dr. Gordon PattersonWeb Application for Aqualab Sensor Monitoring and Analysis
Team Leader(s)
Haley HamiltonTeam Member(s)
Greg Thompson, Ruth Garcia, Haley HamiltonFaculty Advisor
Dr. Khaled SlhoubSecondary Faculty Advisor
Dr. Philip ChanWeb Application for Aqualab Sensor Monitoring and Analysis File Download
Project Summary
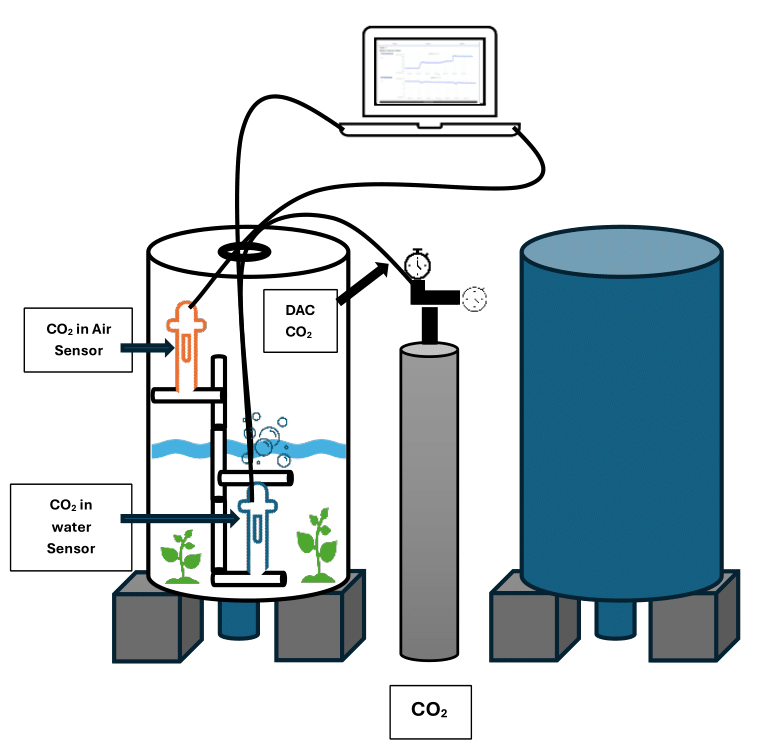
The Aqualab Team, led by Dr. Turingan, is analysing how much carbon dioxide is absorbed in seawater as it used in food-production by marine algae. Multiple sensors are utilized to measure the data and a web application is needed to efficiently record data and allow the values to be viewed in real time as well as give alerts when measurements are outside of desired ranges. The product is able to connect to and read from the Manta+40 sensor from Eureka Water Probes and displays current/recent sensor measurements in real time via a web application. Our system allows user to set desired measurement ranges and gives alerts when measurements are out of specified range on screen and with email push notifications. The system also records past measurements securely in a database and displays all data in an Analysis Tool which allows users to view and filter all data by sensor and time as well as download data into a CSV file. Users can change different system and sensor settings such as the desired sensor range and the frequency at which data is read from the sensor. Finally, the product includes a User Management System which allows Admin user to create new users and keeps track of all users, ensuring they log in to use the application. The system allows 3 different roles with different levels of permissions and access: Admin, Operator, Observer.AARTS
Team Leader(s)
Cade MilesTeam Member(s)
Cade Miles, Jackson Jurevich, Benjamin Stompor, Colton McReynoldsFaculty Advisor
Dr. Lee CarawayAARTS File Download
Project Summary
A fully modular recon and support drone that can travel with and provide support to tank units and infantry divisions. The drone will be sent from its armored vehicle or infantry unit where it will be controlled by an operator. The image capture system will collect visual and LWIR thermal data which will be fed to a learning model to identify the target. If the operator is in a turreted vehicle, they can use the drone's laser range finder to help adjust turret rotation. The position of the target will be triangulated, and the turret will move accordingly.Biochar Remediation of Regolith Leachate
Team Leader(s)
Mia MarkietTeam Member(s)
Mia MarkietFaculty Advisor
Dr. Andrew PalmerBiochar Remediation of Regolith Leachate File Download
Project Summary
As global populations rise and climate instability worsens, the threat of soil degradation and contamination grows, impacting food security and agricultural sustainability. Over 33% of the world's arable soils are polluted with heavy metals like cadmium (Cd), Chromium (Cr), and arsenic (As), which reduce soil fertility, impair crop growth, and pose risks to human health. Biochar, a carbon-rich product of pyrolyzed organic material, has shown promise on Earth as a soil amendment capable of immobilizing heavy metals and improving soil quality. Its adsorption capacity is influenced by surface area, pore size, and functional groups. Martian regolith simulant mimics contaminated terrestrial soils and gives us a good analog for pollution remediation on Earth and developing extraterrestrial agriculture. This study investigates the effectiveness of pine biochar in adsorbing heavy metals from Exolith™ Martian regolith simulant leachate, for Earth-based remediation and off-planet agriculture. Regolith was leached using 0.5 M HCl to extract bioavailable metals into solution, then treated with 1–20% biochar by volume. Samples were shaken for 72 hours at 25 °C, filtered, and analyzed using Inductively Coupled Plasma Optical Emission Spectrometry (ICP-OES). Z-tests compared treatment groups to the 0% control (pEffect of Artificial Lights on IRL Algal Communities
Team Member(s)
Julia LonksFaculty Advisor
Dr. Austin FoxEffect of Artificial Lights on IRL Algal Communities File Download
Project Summary
Marine phytoplankton are responsible for over 50% of Earth's global photosynthesis, and are vital for carbon drawdown, and form the base of the aquatic food webs. During the daytime, less than ten percent of the sun's energy is converted and available to primary consumers. In the past 150 years, the invention and proliferation of the light bulb have led to abundant artificial light at night (ALAN). All organisms, from humans to phytoplankton, rely on light to control internal biological functions; the most important for this study is the effect of ALAN on photosynthetic activity. As ALAN intensity's extent increases at about two percent per year, understanding the impact of nighttime light on phytoplankton and marine ecosystems is increasingly critical. The increased intensity and varying wavelength of light may impact the extent of artificial light influence on phytoplankton populations in coastal ecosystems.Project Objective
This study aimed to analyze the effects of different wavelengths of ALAN in the Indian River Lagoon, near the Melbourne Causeway, through laboratory experiments. The expected results were for phytoplankton growth to be greater when exposed to light at night and most significant for purple, orange, and then red. Our objective was to determine the extent that different wavelengths of ALAN impact local phytoplankton communities.Manufacturing Design Methods
We collected IRL water samples by bucket and transitioned 1500 mL samples into glass jars stored in a water bath by treatment. Four treatments with three sample jars were enclosed in blackout plastic. We attached purple, orange, and red color films to the lights and dimmed the intensity with neutral masking tape to mimic ALAN. The samples were cultured for four weeks in a 12:12 hour light:ALAN cycle. A Sonde YS1 measured DO, pH, salinity, temperature, and chlorophyll concentration. Data points were averaged over five random consecutive points using Google Sheets and Scripts.Analysis
There was no significant change across treatments and a gradual downward trend over time. We expected there to be a greater chlorophyll content in the tanks with ALAN compared to the dark control; however, the only difference occurred with Site 2; it started at a higher chlorophyll content and had a spike after additional water was added to ensure accurate readings due to evaporation loss. None of the other treatments had a noticeable change, likely because of the lower phytoplankton content. The lack of abundance of phytoplankton in the collected samples and the insignificant effect of ALAN on the surface waters is notable in that lights may not significantly impact marine life due to light attenuation and low incidence of phytoplankton.Acknowledgement
I would like to thank Dr. Fox and Ben Crews for their help throughout the design and implementation.Waterjet Abrasive Removal System (WARS)
Team Leader(s)
Justin Sarnowski (Project Manager), Kenneth Speth (Systems Engineer)Team Member(s)
Gabriella Cadolino, Colin Foley, Luca Garratt, Caleb Koogler, Trevor RobbinsFaculty Advisor
Dr. Anand B.NellippallilSecondary Faculty Advisor
Dr. Chiradeep SenWaterjet Abrasive Removal System (WARS) File Download
Project Summary
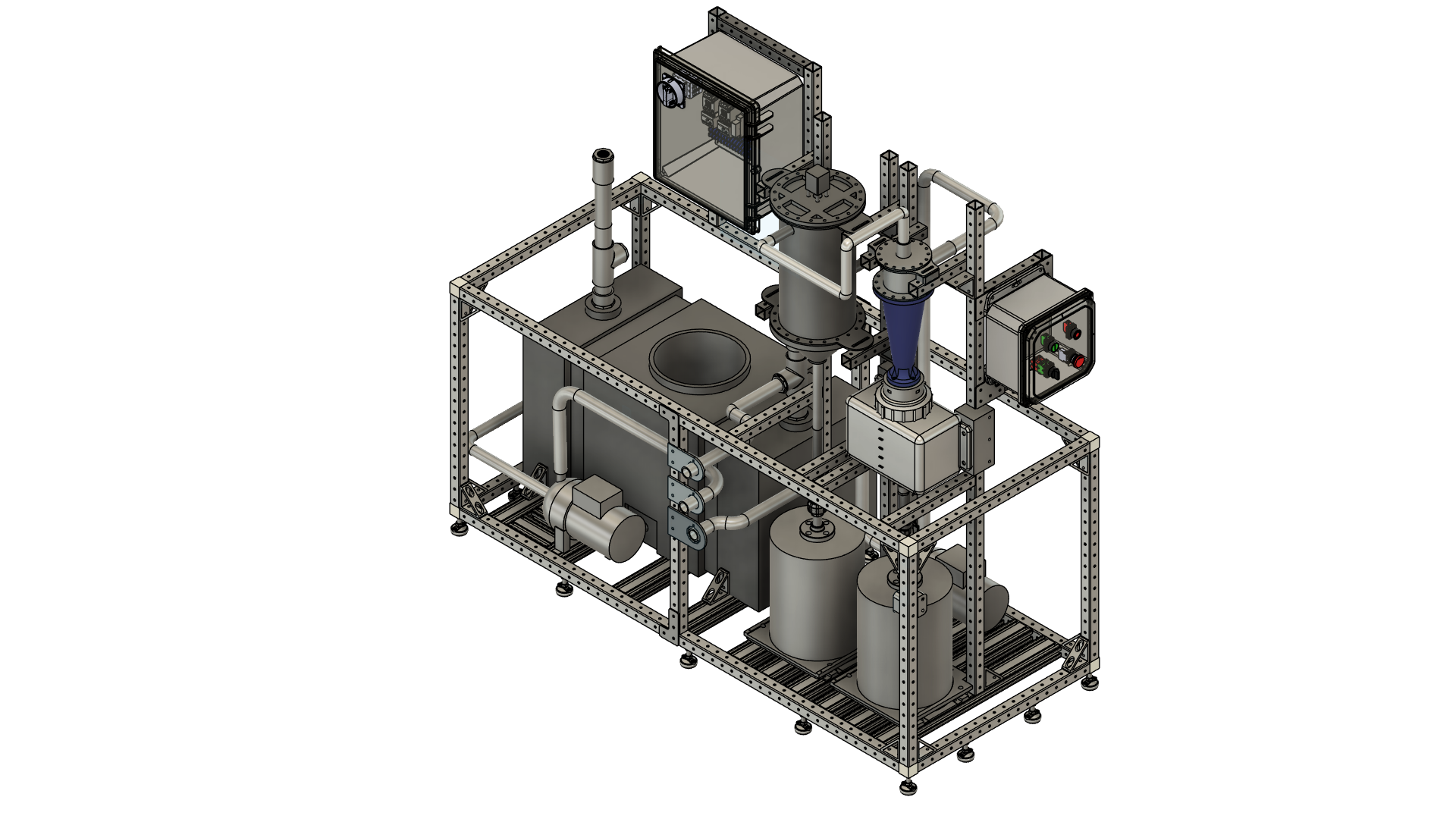
The Waterjet Abrasive Removal System (WARS) is a senior design team tasked with the development and design of a product that removes settled powdered garnet abrasive from the collection tank of an OMAX GlobalMAX waterjet at the L3Harris Student Design Center (L3HSDC) to minimize both required manual effort and downtime of the waterjet. This process includes an array of submerged jets in the waterjet tank that directs a high-pressure flow of water through three nozzles to homogenize the tank mixture for transportation to a series of separation devices. The first filtration device is a cyclone separator, which uses a vortex flow to force the abrasive particles downwards while lower pressure forces the remaining fluid upwards. The second filtration device in the system is a self-cleaning filter, which contains a 50-micron stainless steel wedge wire mesh that catches the abrasive while wiper blades force the captured abrasive downward towards a disposal bucket. The water flowing through the system will settle in a surge tank, which will feed back into the submerged jets. As this is a cyclic process with the water feeding back to the waterjet tank, the system can reuse the water which minimizes the amount of water lost in the cleaning process.Project Objective
The objective of WARS is to design, build, and demonstrate a novel engineered solution that can remove debris from a waterjet collection in a way that minimizes the manual labor required for cleaning and downtime of waterjet operation.Manufacturing Design Methods
The final product consists of two primary subsystems classified as collections and separations. The collections subsystem agitates and transports abrasive debris into the separation subsystem. The separation subsystem then removes the abrasive and other impurities from the water and returns the filtered water back to the collection subsystem to be used as the inlet for the submerged jets array. The submerged jets is a Schedule-80 PVC piping apparatus that uses three pipe legs running down the height of the tank. These legs are connected by a crossbar pipe extending across the waterjet tank's width. Each leg extends to the bottom of the tank with a 90-degree elbow fitting. Connected to the other side of the pipe fittings is a reducer bushing with a steel pressure nozzle that pressurizes the outflow of water. All connections between pipes are bonded using PVC glue and remain fixed to the tank by attaching the system to metal bars fixed to the side legs of the jets using hose clamps. The cyclone separator consists of a stainless steel upper body cylinder section and a 3D printed ASA filament lower body cone section with an aluminum inner lining. The upper body cylinder is made of 304 stainless steel for the wall, flanges, top plate, and inlet and overflow of the cyclone, which are welded together. The top plate is bolted onto the main cylinder body with a rubber gasket to seal the system. The cone section has an epoxy coating to prevent degradation from the water. The self-cleaning filter is constructed of 304 stainless steel with two flanges welded on the top and bottom edge to allow a lid and disposal cone to be bolted on with a gasket between the surfaces. A stainless-steel shaft runs through the center axis of the filter with additional shafts running through the axis that serve as arms for the wiper blades. These blades are made of two-part polyurethane fixed to the wiper arms. The filter mesh is a stainless steel 50-micron wedge wire mesh that is housed in the filter body, sitting on the shaft support, which also serves as a filter retainer. The disposal cone at the bottom is made from 3D printed, ASA filament.Specification
Size: 6’6” x 2’6” x 6’6” Weight (empty): 350 lbs. Estimated Weight (filled): 1000 lbs.Analysis
The Scanning Electron Microscope located in Florida Institute of Technology’s Microscopy Lab was utilized to gain insight into the minimum significant size of particles present within a used sample of the abrasive pulled directly from the waterjet’s tank. The microscope was used to conduct an elemental analysis of both an unused and a used abrasive sample to determine that there was no large amount of non-abrasive material present in the tank. Additionally, the minimum particle size that was present within the used sample was 50 microns. The system was then designed to accommodate the minimum particle size, allowing for it to effectively remove particles up to 50 microns in size as well as up to 20 pounds of abrasive per hour.Future Works
Future work that can be done for this project includes the development of a system that improves the current method of drying the removed abrasive. The working method used by L3HSDC staff involves placing full disposal buckets outside of the high bay for the water to evaporate out of the abrasive. This process can take several days and depends on current weather conditions at the time. An improved method for drying could have the effect of reducing the time between the collection of abrasive and final disposal as well as create a product that functions independent of weather conditions.Acknowledgement
We would like to offer a special thanks to SAI Filters for their donation of the filter mesh, André Robidoux as our GSA, Zac Schardt, Rongxuan Ma, and the staff members of the L3HSDC, Lab Manager Tatiana Karpova and other members of the microscopy lab, and the Florida Tech Machine Shop.TEC-V ROV
Team Leader(s)
Stephen CosterTeam Member(s)
Stephen Coster, Henry Hill, Gabor Papp, Michael DowlingFaculty Advisor
Dr. Stephen WoodTEC-V ROV File Download
Project Summary
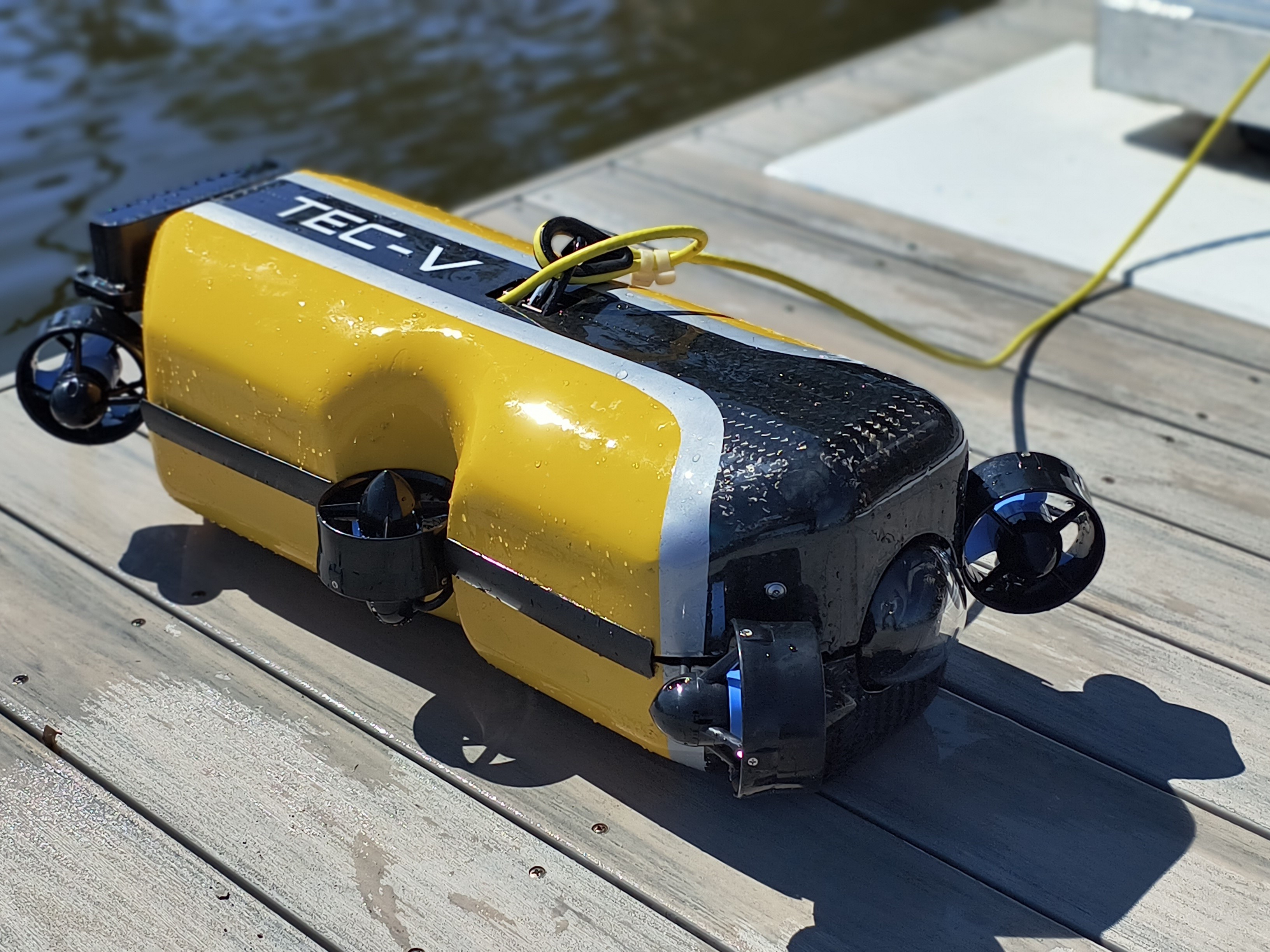
TEC-V (Topographic Exploration Cave Vehicle) is a remotely operated vehicle (ROV) designed for the underwater exploration of enclosed environments, such as caves, shipwrecks, port structures, and large-scale pipelines. TEC-V’s design incorporates aspects that allow the vehicle to operate in these conditions, including a reduced, streamlined profile and five degrees of freedom to improve maneuverability. The vehicle employs a carbon fiber fairing to enclose the internal components, the design of which emphasizes favorable hydrodynamic properties to increase control. While operating in these enclosed areas, TEC-V utilizes a side-scan sonar unit to scan its surroundings and obtain a two-dimensional plane of data. As the vehicle performs a roll maneuver, a ring of data is collected. Data processing allows subsequent scans to be stitched together to develop a continuous, three-dimensional map. With the successful mapping of these enclosed areas, the project aims to develop a model to intuitively visualize and manipulate a three-dimensional environment. These models will be useful to obtain detailed imaging of environments where human divers cannot reach or areas where the risk to human life is too great. Scanning marine environments such as underwater caves, sinkholes, reefs, or environments under a layer of ice will be beneficial to the fields of geology, biology, and oceanography to increase understanding of these areas. Inspection of shipwrecks, oil platforms, pipelines, and port structures may yield initial condition assessments to specify areas in need of repair and reduce danger to human divers.Project Objective
The goals of the TEC-V project were to develop a modular, cost-effective platform for confined underwater environment exploration. After completing the design; hydrostatic, and hydrodynamic analyses were performed on the vehicle to achieve the desired properties to satisfy mission objectives. Once vehicle dynamics were optimized, a sonar unit was integrated and the mapping procedure was tested for future development.Manufacturing Design Methods
TEC-V’s frame comprises of starboard rails, 3D-printed brackets/braces, and 316 stainless steel hardware. The 3D printed parts were printed out of PETG filament which is more rigid and water resistant than other available filaments. For the fairing, a negative mold was 3D-printed for manufacture. The mold was sealed in a protective vacuum bag and the carbon fiber was hand-laminated into the mold. A final vacuum bag was applied over the part and left to cure. Post-processing consisted of sanding, painting, and clear coating the shells.Future Works
The TEC-V platform offers a base-level system to facilitate the eventual application of autonomy. Through the integration of additional sensors and programming beyond the initial scope of this project, TEC-V has the potential for tether-less operation and data processing. The use of advanced machine learning and artificial intelligence may be required for progression. Additional software development focusing on filtering and displaying sonar data would further enhance the utility and accessibility of the platform.Acknowledgement
The team would like to express thanks to the students in the Underwater Technology Lab (UTL) for their support and guidance. Also a special thanks to Dr. Ronnal Reichard and the team at Structural Composites, Inc. for their expertise and donations to this project.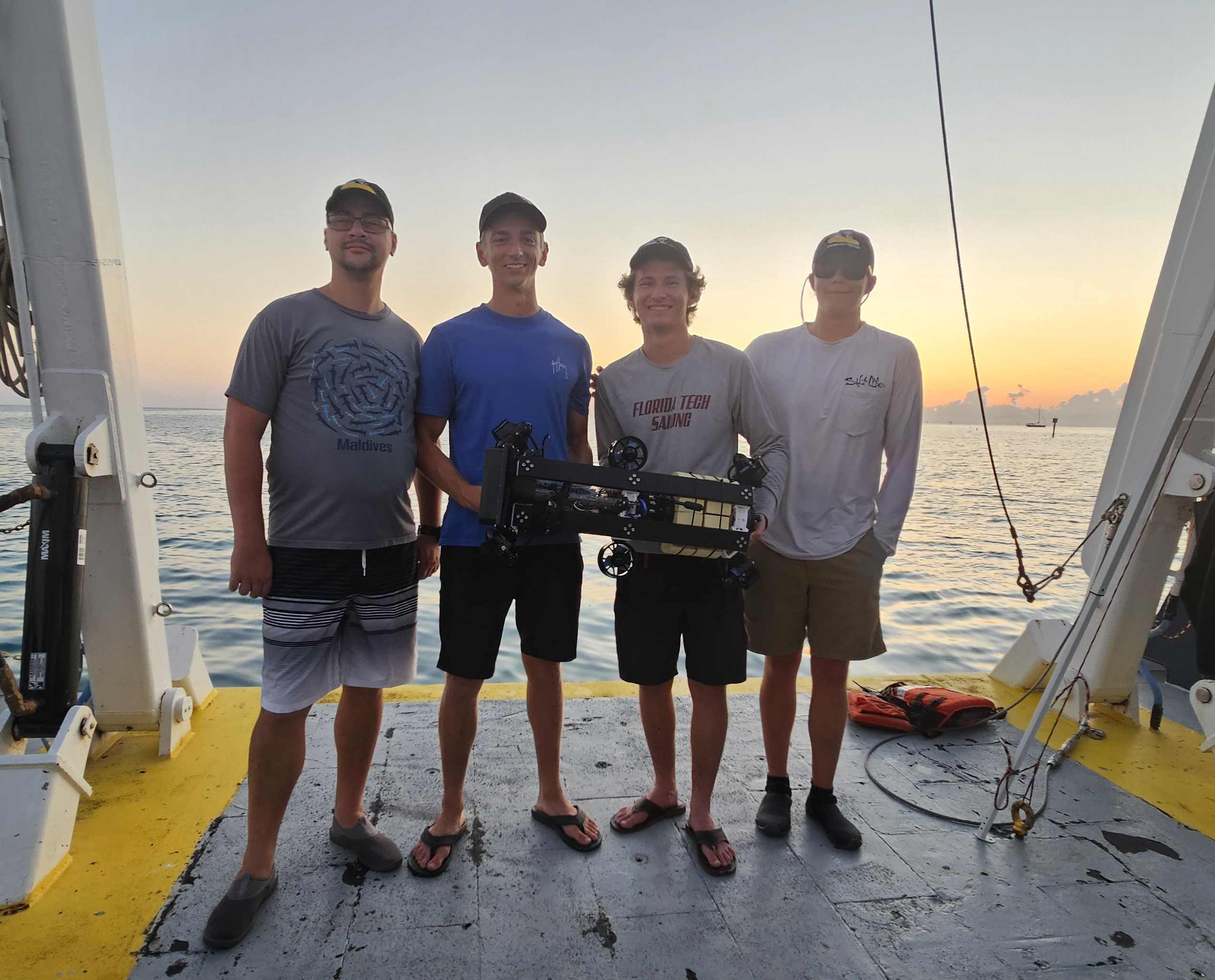
Investigating the Relationship Between White Dwarfs and the Milky Way's Spiral Structure
Team Member(s)
Shailyn NegronFaculty Advisor
Dr. Luis H. Quiroga-NuñezInvestigating the Relationship Between White Dwarfs and the Milky Way's Spiral Structure File Download
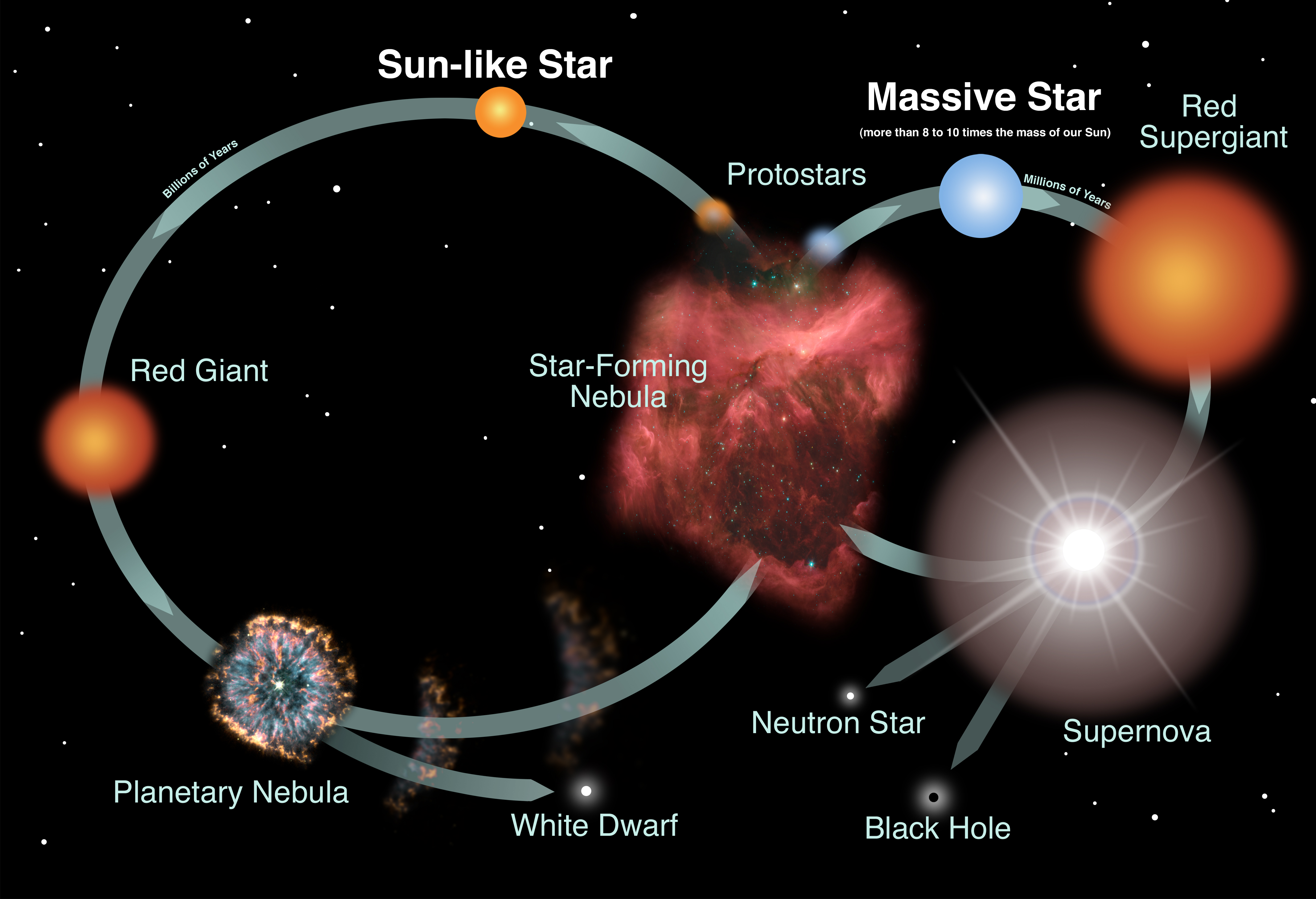
Project Summary
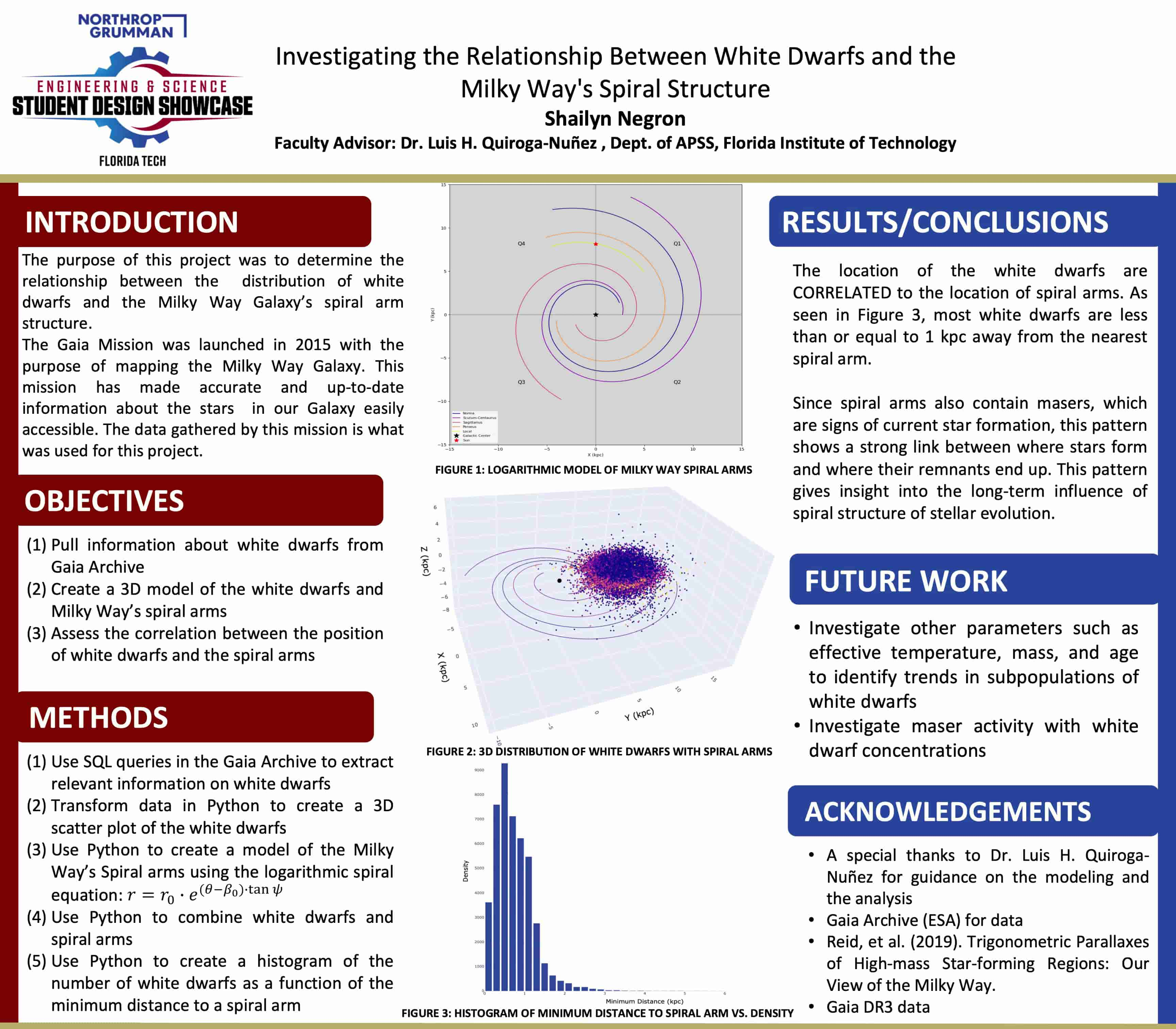
White dwarfs can be thought of as the “fossils” of the Milky Way Galaxy. They are the remnants of low- to medium-mass stars and help scientists understand stellar and Galactic evolution. Although they are found throughout the Milky Way, their spatial distribution with respect to the Galaxy’s spiral arms is not well understood. The purpose of this project is to analyze the correlation between the location of white dwarfs and the Milky Way's spiral arm structure. This correlation was determined by modeling the Galaxy's structure and the location of white dwarfs in a 3D plot, using up-to-date data from the Gaia mission.Project Objective
To determine if there is a significant relationship between the location of white dwarfs and the Milky Way's Spiral arms.Acknowledgement
Special thanks to Dr. Luis H. Quiroga-Nuñez for guidance. Data provided by the Gaia Archive (ESA) and Reid et al. (2019) on spiral arm modeling.